Czujniki przeszkód
Les capteurs d'obstacles d'Eliobot sont des capteurs infrarouges qui permettent de détecter les obstacles à une certaine distance.
Używaj z Elioblocami
Do wykorzystania czujników przeszkód Eliobot na Elioblocach wykorzystujemy klocki z kategorii  .
.
Używanie z Pythonem
W Pythonie każdy czujnik przeszkód należy zdefiniować jako obiekt.
Na czujniku przeszkód mamy 4 czujniki, podłączamy je do pinów:
| Capteur gauche | Capteur devant | Capteur droit | Capteur derrière | |
|---|---|---|---|---|
| Pin | IO4 | IO5 | IO6 | IO7 |
Czujniki zwracają wartości analogowe.
Powiązane przykłady
Przykład eliobbloków
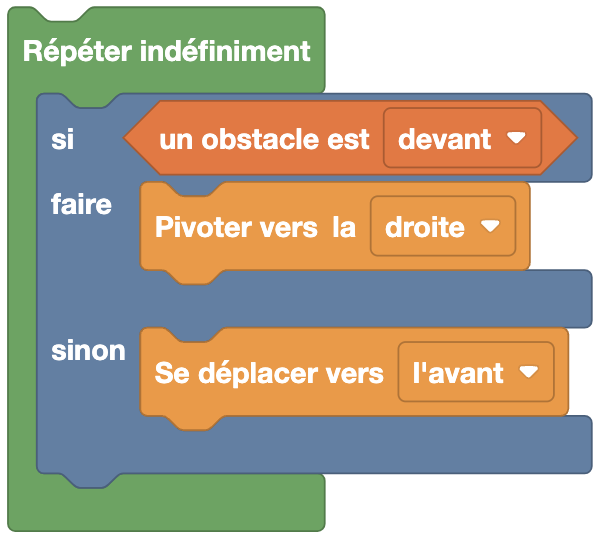
Tutaj, jeśli przed Eliobotem zostanie wykryta przeszkoda, skręca on w prawo, w przeciwnym razie porusza się do przodu.
Przykład Pythona
Z biblioteką elio.py
import board
import pwmio
import analogio
from elio import Motors, ObstacleSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
obstacle_pins = [
analogio.AnalogIn(board.IO4), # Gauche
analogio.AnalogIn(board.IO5), # Avant
analogio.AnalogIn(board.IO6), # Droite
analogio.AnalogIn(board.IO7), # Arrière
]
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
obstacle_sensor = ObstacleSensor(obstacle_pins)
speed = 100
while True:
if obstacle_sensor.get_obstacle(1): # Obstacle devant
motors.turn_right(speed)
else:
motors.move_forward(speed)
W tym przykładzie Eliobot porusza się do przodu, jeśli nie wykryje przed sobą przeszkody, w przeciwnym razie skręca w prawo.
Bez biblioteki elio.py
import board
import analogio
obstacle_avant = analogio.AnalogIn(board.IO5) # Capteur avant
while True:
valeur = obstacle_avant.value
if valeur < 10000: # Obstacle détecté
print("Obstacle détecté, valeur :", valeur)
else:
print("Aucun obstacle, valeur :", valeur)
Detekcja jest wyzwalana, gdy wartość czujnika spadnie poniżej 10000. Wartość tę można dostosować w zależności od żądanej odległości wykrywania.