Capteurs d'obstacles
Les capteurs d'obstacles d'Eliobot sont des capteurs infrarouges qui permettent de détecter les obstacles à une certaine distance.
Utilisation avec Elioblocs
Pour utiliser les capteurs d'obstacles d'Eliobot sur Elioblocs, on utilise les blocs de la catégorie  .
.
Utilisation avec Python
Avec python, il faut définir chaque capteur d'obstacle comme un objet.
On a 4 capteurs sur le capteur d'obstacle, ils sont branché sur les pins suivants :
| Capteur gauche | Capteur devant | Capteur droit | Capteur derrière | |
|---|---|---|---|---|
| Pin | IO4 | IO5 | IO6 | IO7 |
Les capteurs renvoient des valeurs analogiques.
Exemples associés
Exemple Elioblocs
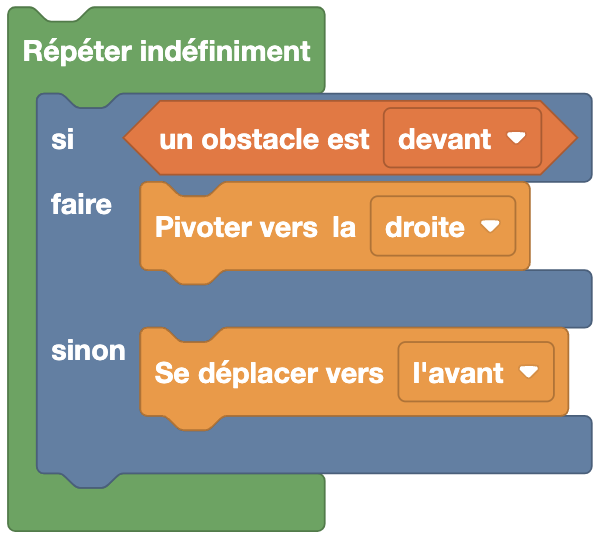
Ici, si un obstacle est détecté devant Eliobot, il tourne vers la droite sinon il avance.
Exemple Python
Avec la librairie elio.py
import board
import pwmio
import analogio
from elio import Motors, ObstacleSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
obstacle_pins = [
analogio.AnalogIn(board.IO4), # Gauche
analogio.AnalogIn(board.IO5), # Avant
analogio.AnalogIn(board.IO6), # Droite
analogio.AnalogIn(board.IO7), # Arrière
]
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
obstacle_sensor = ObstacleSensor(obstacle_pins)
speed = 100
while True:
if obstacle_sensor.get_obstacle(1): # Obstacle devant
motors.turn_right(speed)
else:
motors.move_forward(speed)
Dans cet exemple, Eliobot avance s'il ne détecte pas d'obstacle devant lui, sinon il tourne à droite.
Sans la librairie elio.py
import board
import analogio
obstacle_avant = analogio.AnalogIn(board.IO5) # Capteur avant
while True:
valeur = obstacle_avant.value
if valeur < 10000: # Obstacle détecté
print("Obstacle détecté, valeur :", valeur)
else:
print("Aucun obstacle, valeur :", valeur)
La détection se déclenche lorsque la valeur du capteur passe en dessous de 10000. Cette valeur peut être ajustée selon la distance de détection souhaitée.