Czujniki liniowe
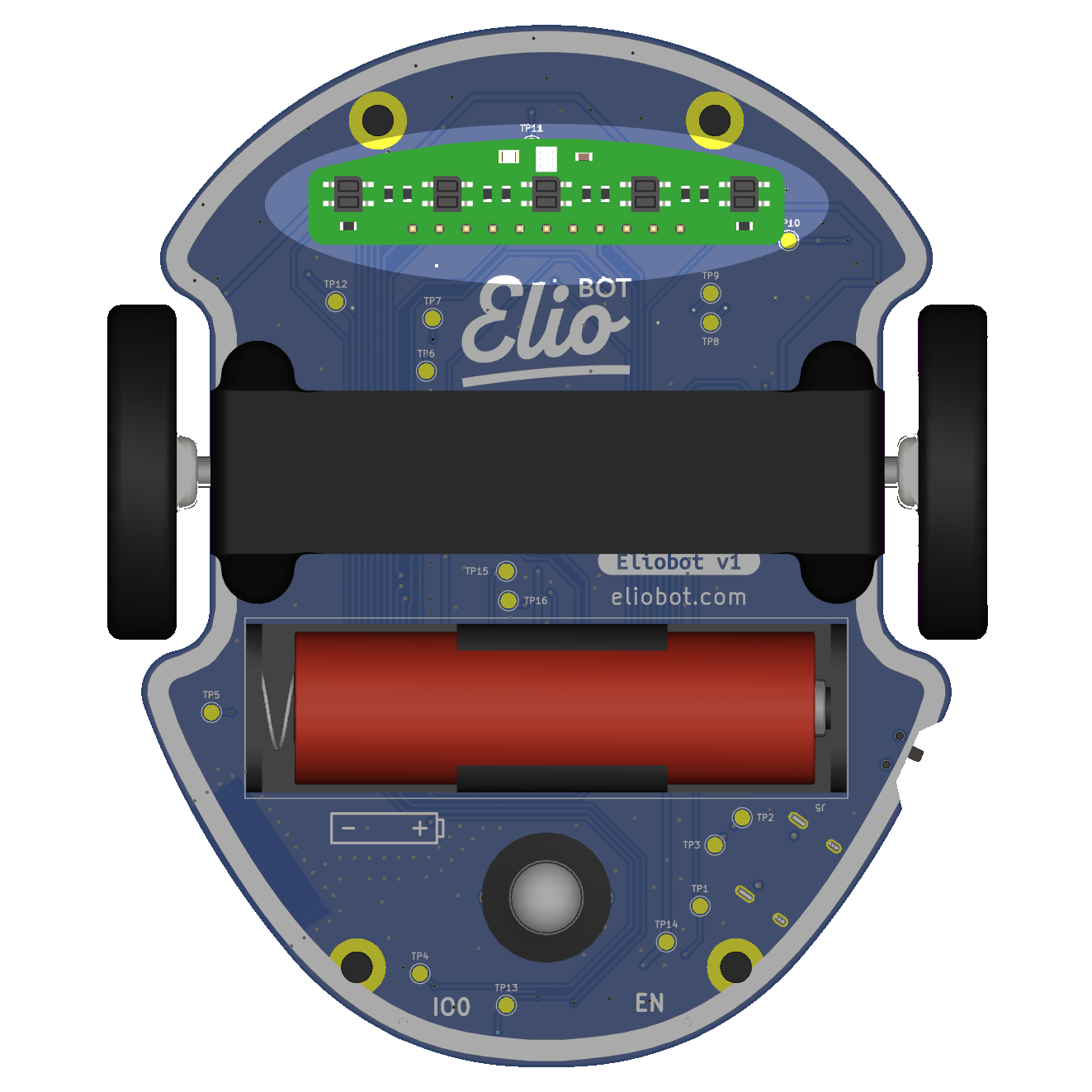
Les capteurs de ligne d'Eliobot sont des capteurs infrarouges qui permettent de détecter les lignes.
Używaj z Elioblocami
Do wykorzystania czujników liniowych Eliobot na Elioblocach wykorzystujemy bloczki z kategorii  .
.
Używanie z Pythonem
W Pythonie każdy czujnik linii należy zdefiniować jako obiekt. Na czujniku liniowym mamy 5 czujników, są one podłączone do następujących pinów:
| Capteur 1 | Capteur 2 | Capteur 3 | Capteur 4 | Capteur 5 | |
|---|---|---|---|---|---|
| Pin | IO10 | IO11 | IO12 | IO13 | IO14 |
Do wykrycia linii wykorzystujemy światło odbite, mierzymy światło otoczenia, a światło odbite – do obliczenia wartości.
Czujniki zwracają wartości analogowe.
Powiązane przykłady
Przykład eliobbloków
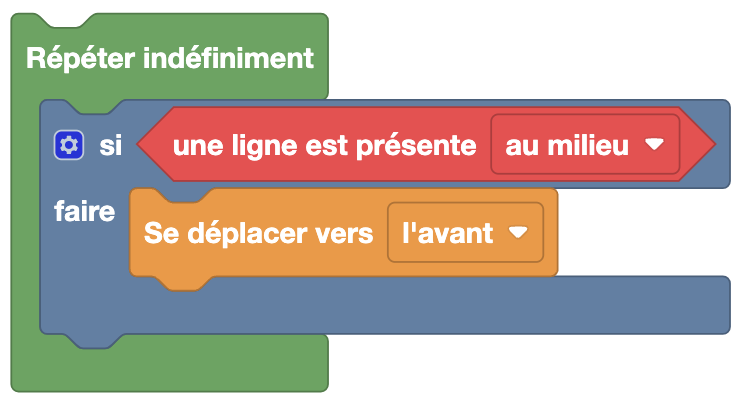
Tutaj, jeśli wykryjemy linię pod czujnikiem 3 (środkowy czujnik), ruszamy do przodu.
Przykład Pythona
Z biblioteką elio.py
import board
import pwmio
import analogio
import digitalio
from elio import Motors, LineSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
lineCmd = digitalio.DigitalInOut(board.IO33)
lineCmd.direction = digitalio.Direction.OUTPUT
lineInput = [
analogio.AnalogIn(board.IO10), # Capteur 0
analogio.AnalogIn(board.IO11), # Capteur 1
analogio.AnalogIn(board.IO12), # Capteur 2 (centre)
analogio.AnalogIn(board.IO13), # Capteur 3
analogio.AnalogIn(board.IO14), # Capteur 4
]
line_sensor = LineSensor(lineInput, lineCmd, motors)
threshold = 5000 # Seuil de détection (à calibrer)
while True:
if line_sensor.get_line(2) > threshold: # Capteur central détecte une ligne
motors.move_forward(100)
Tutaj, jeśli wykryjemy linię pod czujnikiem centralnym (indeks 2), idziemy do przodu.
Próg jest przybliżony — użyj line_sensor.calibrate_line_sensors(), aby obliczyć go automatycznie.
Bez biblioteki elio.py
import board
import analogio
import digitalio
import time
lineCmd = digitalio.DigitalInOut(board.IO33)
lineCmd.direction = digitalio.Direction.OUTPUT
capteur_centre = analogio.AnalogIn(board.IO12) # Capteur 2 (centre)
def get_line_value():
lineCmd.value = True
time.sleep(0.02)
lit = capteur_centre.value
lineCmd.value = False
time.sleep(0.02)
ambient = capteur_centre.value
return ambient - lit
threshold = 5000
while True:
if get_line_value() > threshold:
print("Ligne détectée !")
Zwracana wartość to różnica między światłem otoczenia a światłem odbitym: im wyższa, tym bardziej kontrastowa linia.