Sensori di ostacoli
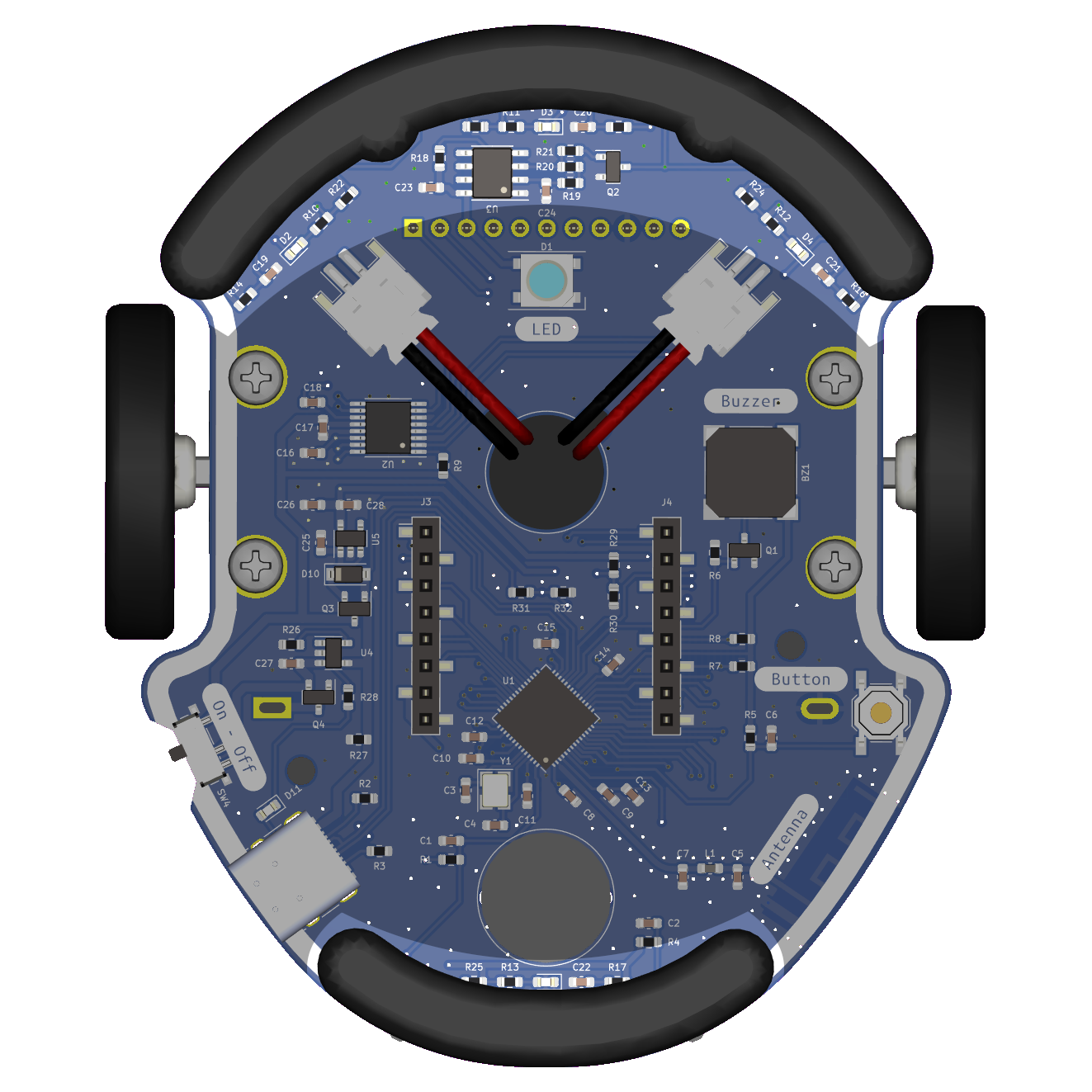
Les capteurs d'obstacles d'Eliobot sont des capteurs infrarouges qui permettent de détecter les obstacles à une certaine distance.
Utilizzare con Eliobloc
Per utilizzare i sensori di ostacolo Eliobot sugli Eliobloc utilizziamo i blocchi della categoria  .
.
Utilizzo con Python
Con Python, devi definire ciascun sensore di ostacolo come un oggetto.
Abbiamo 4 sensori sul sensore ostacoli, sono collegati ai seguenti pin:
| Capteur gauche | Capteur devant | Capteur droit | Capteur derrière | |
|---|---|---|---|---|
| Pin | IO4 | IO5 | IO6 | IO7 |
I sensori restituiscono valori analogici.
Esempi correlati
Esempio di Eliobloc
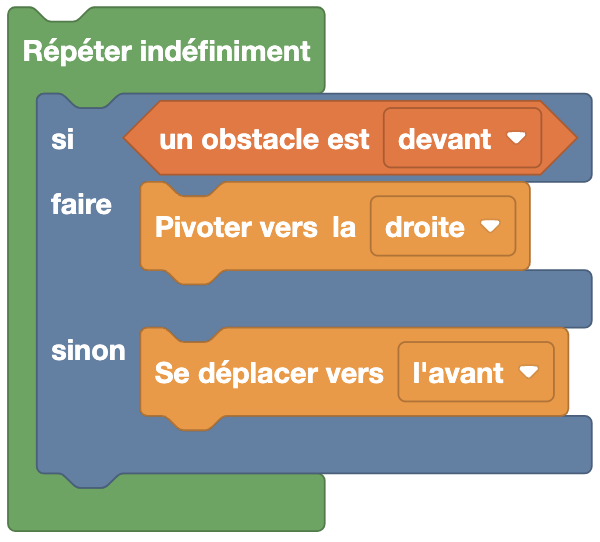
Qui, se viene rilevato un ostacolo davanti a Eliobot, gira a destra, altrimenti avanza.
Esempio di Python
Con la libreria elio.py
import board
import pwmio
import analogio
from elio import Motors, ObstacleSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
obstacle_pins = [
analogio.AnalogIn(board.IO4), # Gauche
analogio.AnalogIn(board.IO5), # Avant
analogio.AnalogIn(board.IO6), # Droite
analogio.AnalogIn(board.IO7), # Arrière
]
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
obstacle_sensor = ObstacleSensor(obstacle_pins)
speed = 100
while True:
if obstacle_sensor.get_obstacle(1): # Obstacle devant
motors.turn_right(speed)
else:
motors.move_forward(speed)
In questo esempio Eliobot avanza se non rileva un ostacolo davanti a sé, altrimenti gira a destra.
Senza la libreria elio.py
import board
import analogio
obstacle_avant = analogio.AnalogIn(board.IO5) # Capteur avant
while True:
valeur = obstacle_avant.value
if valeur < 10000: # Obstacle détecté
print("Obstacle détecté, valeur :", valeur)
else:
print("Aucun obstacle, valeur :", valeur)
Il rilevamento viene attivato quando il valore del sensore scende al di sotto di 10000. Questo valore può essere regolato in base alla distanza di rilevamento desiderata.