Obstakelsensoren
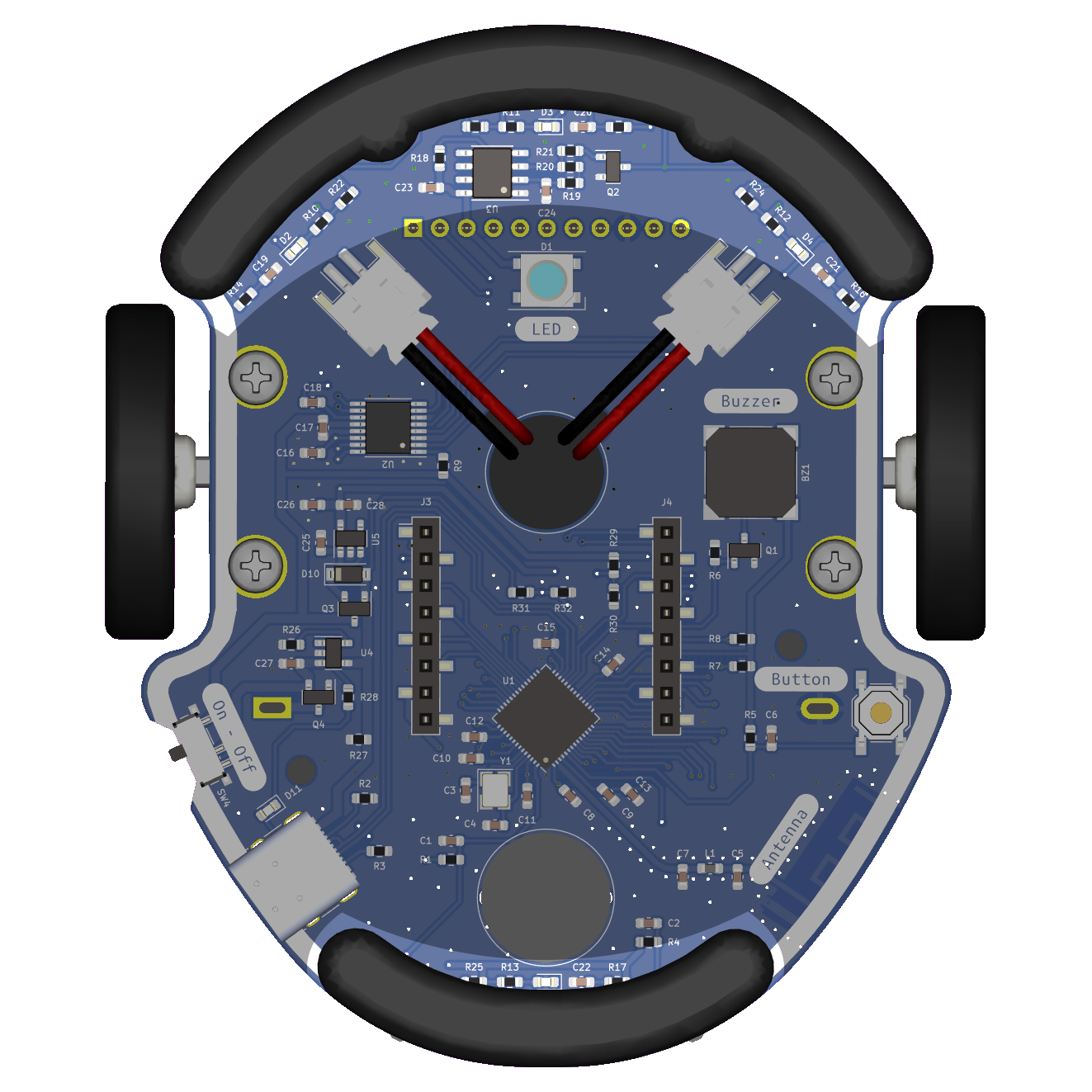
Les capteurs d'obstacles d'Eliobot sont des capteurs infrarouges qui permettent de détecter les obstacles à une certaine distance.
Gebruik met Elioblocs
Om Eliobot obstakelsensoren op Elioblocs te gebruiken, gebruiken we blokken uit de categorie  .
.
Gebruik met Python
Met Python moet u elke obstakelsensor als een object definiëren.
Op de obstakelsensor hebben we 4 sensoren, deze zijn aangesloten op de volgende pinnen:
| Capteur gauche | Capteur devant | Capteur droit | Capteur derrière | |
|---|---|---|---|---|
| Pin | IO4 | IO5 | IO6 | IO7 |
De sensoren retourneren analoge waarden.
Gerelateerde voorbeelden
Elioblocs voorbeeld
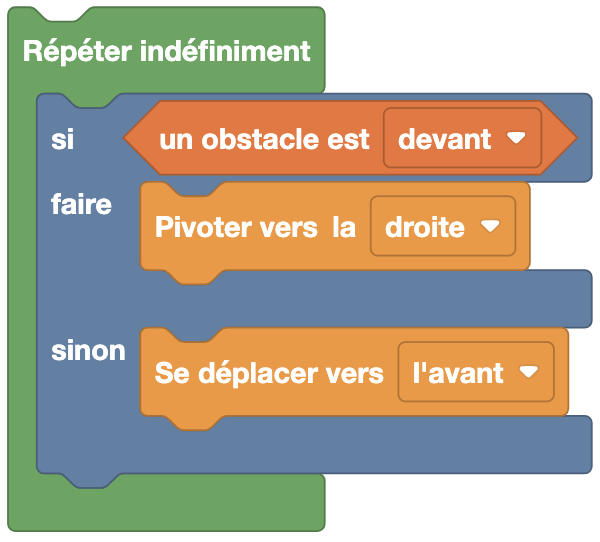
Als hier een obstakel voor Eliobot wordt gedetecteerd, draait hij naar rechts, anders beweegt hij vooruit.
Python-voorbeeld
Met de bibliotheek elio.py
import board
import pwmio
import analogio
from elio import Motors, ObstacleSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
obstacle_pins = [
analogio.AnalogIn(board.IO4), # Gauche
analogio.AnalogIn(board.IO5), # Avant
analogio.AnalogIn(board.IO6), # Droite
analogio.AnalogIn(board.IO7), # Arrière
]
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
obstacle_sensor = ObstacleSensor(obstacle_pins)
speed = 100
while True:
if obstacle_sensor.get_obstacle(1): # Obstacle devant
motors.turn_right(speed)
else:
motors.move_forward(speed)
In dit voorbeeld gaat Eliobot vooruit als hij geen obstakel voor hem detecteert, anders draait hij naar rechts.
Zonder de bibliotheek elio.py
import board
import analogio
obstacle_avant = analogio.AnalogIn(board.IO5) # Capteur avant
while True:
valeur = obstacle_avant.value
if valeur < 10000: # Obstacle détecté
print("Obstacle détecté, valeur :", valeur)
else:
print("Aucun obstacle, valeur :", valeur)
Detectie wordt geactiveerd wanneer de sensorwaarde onder 10000 daalt. Deze waarde kan worden aangepast aan de gewenste detectieafstand.