Senzori de obstacole
Les capteurs d'obstacles d'Eliobot sont des capteurs infrarouges qui permettent de détecter les obstacles à une certaine distance.
Utilizați cu Elioblocs
Pentru a folosi senzorii de obstacole Eliobot pe Elioblocs, folosim blocuri din categoria  .
.
Folosind cu Python
Cu python, trebuie să definiți fiecare senzor de obstacol ca un obiect.
Avem 4 senzori pe senzorul de obstacol, aceștia sunt conectați la următorii pini:
| Capteur gauche | Capteur devant | Capteur droit | Capteur derrière | |
|---|---|---|---|---|
| Pin | IO4 | IO5 | IO6 | IO7 |
Senzorii returnează valori analogice.
Exemple înrudite
Exemplu Elioblocs
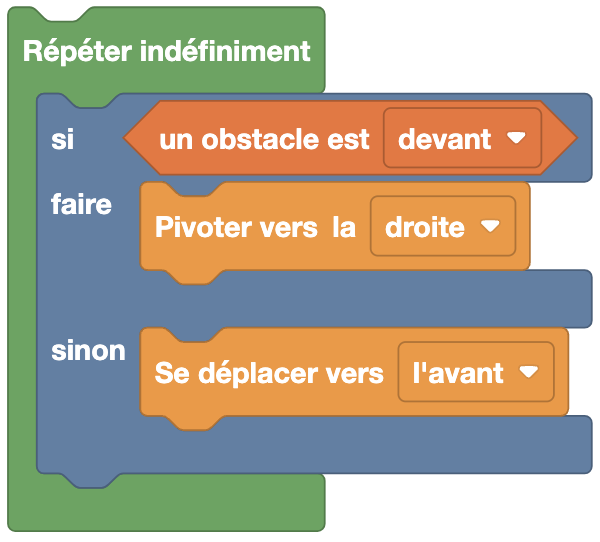
Aici, dacă în fața lui Eliobot este detectat un obstacol, acesta se întoarce la dreapta, altfel se deplasează înainte.
Exemplu Python
Cu biblioteca elio.py
import board
import pwmio
import analogio
from elio import Motors, ObstacleSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
obstacle_pins = [
analogio.AnalogIn(board.IO4), # Gauche
analogio.AnalogIn(board.IO5), # Avant
analogio.AnalogIn(board.IO6), # Droite
analogio.AnalogIn(board.IO7), # Arrière
]
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
obstacle_sensor = ObstacleSensor(obstacle_pins)
speed = 100
while True:
if obstacle_sensor.get_obstacle(1): # Obstacle devant
motors.turn_right(speed)
else:
motors.move_forward(speed)
În acest exemplu, Eliobot înaintează dacă nu detectează un obstacol în fața lui, altfel face dreapta.
Fără bibliotecă elio.py
import board
import analogio
obstacle_avant = analogio.AnalogIn(board.IO5) # Capteur avant
while True:
valeur = obstacle_avant.value
if valeur < 10000: # Obstacle détecté
print("Obstacle détecté, valeur :", valeur)
else:
print("Aucun obstacle, valeur :", valeur)
Detectarea este declanșată atunci când valoarea senzorului scade sub 10000. Această valoare poate fi ajustată în funcție de distanța de detectare dorită.