Silniki


Silniki Eliobota zasilane są bezpośrednio z akumulatora, dlatego działają tylko wtedy, gdy wyłącznik zapłonu znajduje się w pozycji ON.
Używaj z Elioblocami
Do wykorzystania silników Eliobota na Elioblocach używamy bloków z kategorii Mouvement, ponieważ są to silniki, które umożliwiają Eliobotowi poruszanie się.
Używanie z Pythonem
Aby wykorzystać silniki Eliobota w Pythonie, możesz skorzystać z funkcji dostępnych w bibliotece elio.py.
Silniki są podłączone do następujących pinów:
| Moteur gauche | Moteur droit | |
|---|---|---|
| IN1 | IO35 | IO36 |
| IN2 | IO37 | IO38 |
Silniki można sterować na dwa sposoby: cyfrowy lub PWM
W trybie cyfrowym będziemy mieli jedynie możliwość obrócenia silnika w jedną lub drugą stronę i zatrzymania go.
W PWM możliwa będzie również modyfikacja prędkości silnika i ustawienie jej od 0% do 100% maksymalnej prędkości.
Aby dowiedzieć się więcej o pwm: Wikipedia PWM
Powiązane przykłady
Przykład eliobbloków
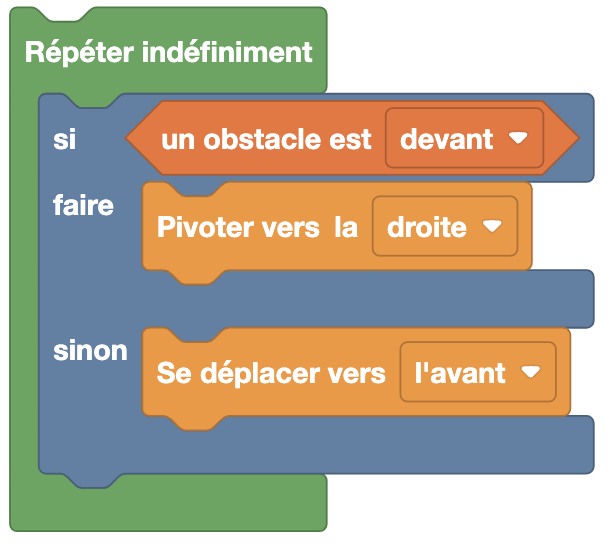
Tutaj używamy bloczków  , aby Eliobot ruszył do przodu, jeśli nie wykryje przed sobą przeszkody, w przeciwnym razie skręci w prawo.
, aby Eliobot ruszył do przodu, jeśli nie wykryje przed sobą przeszkody, w przeciwnym razie skręci w prawo.
Przykład Pythona
Z biblioteką elio.py
import board
import pwmio
import analogio
from elio import Motors, ObstacleSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
obstacle_pins = [
analogio.AnalogIn(board.IO4), # Gauche
analogio.AnalogIn(board.IO5), # Avant
analogio.AnalogIn(board.IO6), # Droite
analogio.AnalogIn(board.IO7), # Arrière
]
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
obstacle_sensor = ObstacleSensor(obstacle_pins)
speed = 100
while True:
if obstacle_sensor.get_obstacle(1): # Obstacle devant
motors.turn_right(speed)
else:
motors.move_forward(speed)
W tym przykładzie Eliobot porusza się do przodu, jeśli nie wykryje przed sobą przeszkody, w przeciwnym razie skręca w prawo.
Bez biblioteki elio.py
import board
import pwmio
import analogio
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
obstacle_avant = analogio.AnalogIn(board.IO5)
vitesse = 65535 # valeur PWM max (0–65535)
while True:
if obstacle_avant.value < 10000: # Obstacle devant
# Tourner à droite
AIN1.duty_cycle = vitesse
AIN2.duty_cycle = 0
BIN1.duty_cycle = 0
BIN2.duty_cycle = vitesse
else:
# Avancer
AIN1.duty_cycle = 0
AIN2.duty_cycle = vitesse
BIN1.duty_cycle = 0
BIN2.duty_cycle = vitesse
Ten sam przykład co poprzednio, ale bez użycia biblioteki elio.py.