Hindernissensoren
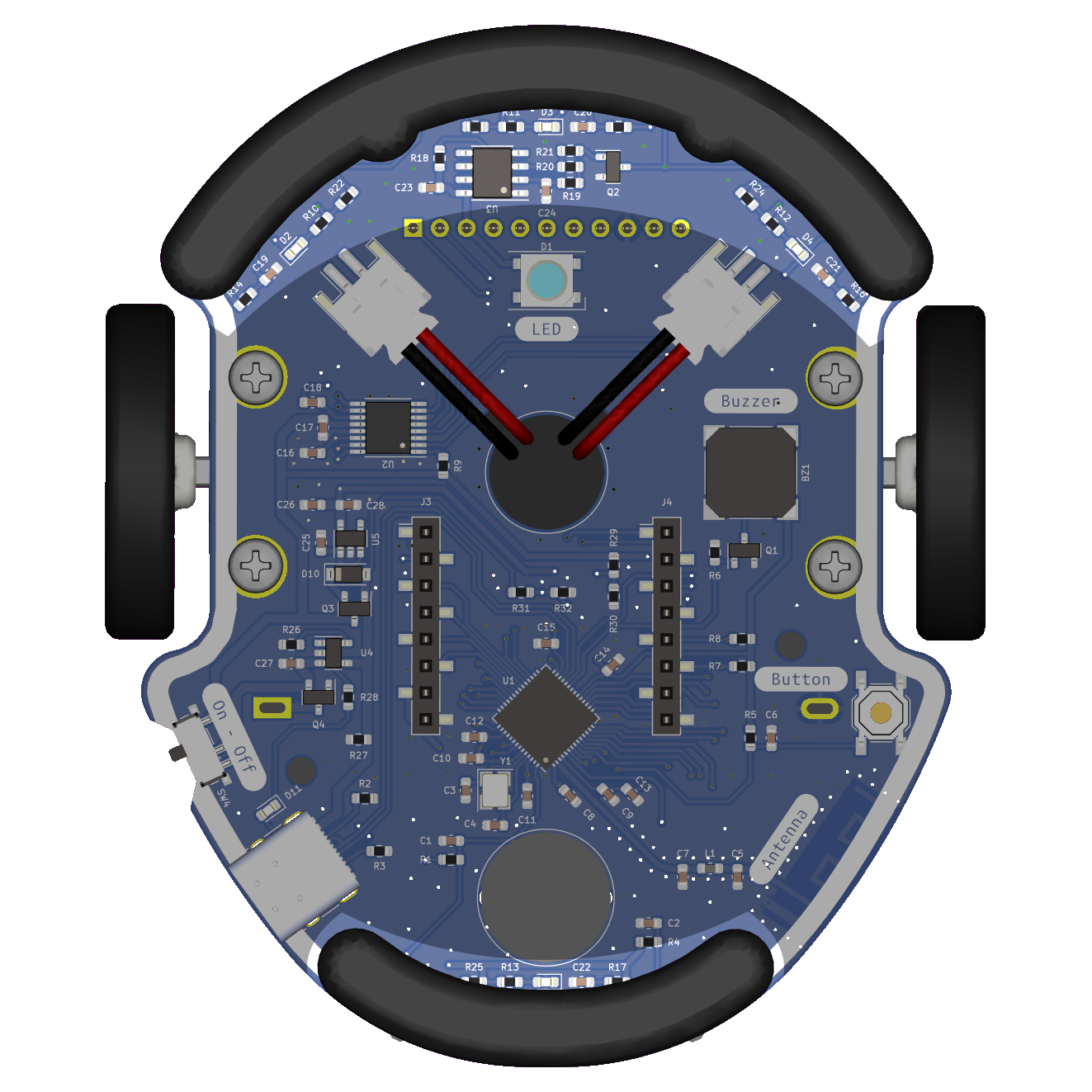
Les capteurs d'obstacles d'Eliobot sont des capteurs infrarouges qui permettent de détecter les obstacles à une certaine distance.
Zur Verwendung mit Elioblocs
Um Eliobot-Hindernissensoren auf Elioblocs zu verwenden, verwenden wir Blöcke aus der Kategorie  .
.
Verwendung mit Python
Mit Python müssen Sie jeden Hindernissensor als Objekt definieren.
Wir haben 4 Sensoren am Hindernissensor, sie sind an folgende Pins angeschlossen:
| Capteur gauche | Capteur devant | Capteur droit | Capteur derrière | |
|---|---|---|---|---|
| Pin | IO4 | IO5 | IO6 | IO7 |
Die Sensoren liefern analoge Werte.
Verwandte Beispiele
Elioblocs-Beispiel
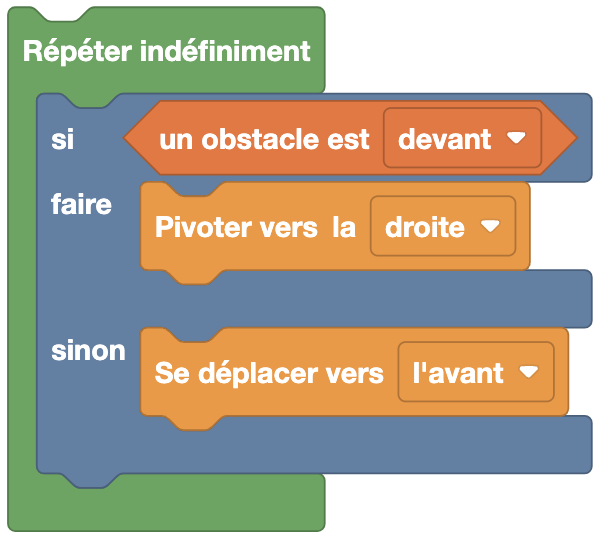
Wenn hier ein Hindernis vor Eliobot erkannt wird, dreht er sich nach rechts, andernfalls bewegt er sich vorwärts.
Python-Beispiel
Mit der Bibliothek elio.py
import board
import pwmio
import analogio
from elio import Motors, ObstacleSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
obstacle_pins = [
analogio.AnalogIn(board.IO4), # Gauche
analogio.AnalogIn(board.IO5), # Avant
analogio.AnalogIn(board.IO6), # Droite
analogio.AnalogIn(board.IO7), # Arrière
]
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
obstacle_sensor = ObstacleSensor(obstacle_pins)
speed = 100
while True:
if obstacle_sensor.get_obstacle(1): # Obstacle devant
motors.turn_right(speed)
else:
motors.move_forward(speed)
In diesem Beispiel bewegt sich Eliobot vorwärts, wenn er kein Hindernis vor sich erkennt, andernfalls dreht er sich nach rechts.
Ohne die Bibliothek elio.py
import board
import analogio
obstacle_avant = analogio.AnalogIn(board.IO5) # Capteur avant
while True:
valeur = obstacle_avant.value
if valeur < 10000: # Obstacle détecté
print("Obstacle détecté, valeur :", valeur)
else:
print("Aucun obstacle, valeur :", valeur)
Die Erkennung wird ausgelöst, wenn der Sensorwert unter 10000 fällt. Dieser Wert kann entsprechend der gewünschten Erkennungsentfernung angepasst werden.