Zeilensensoren
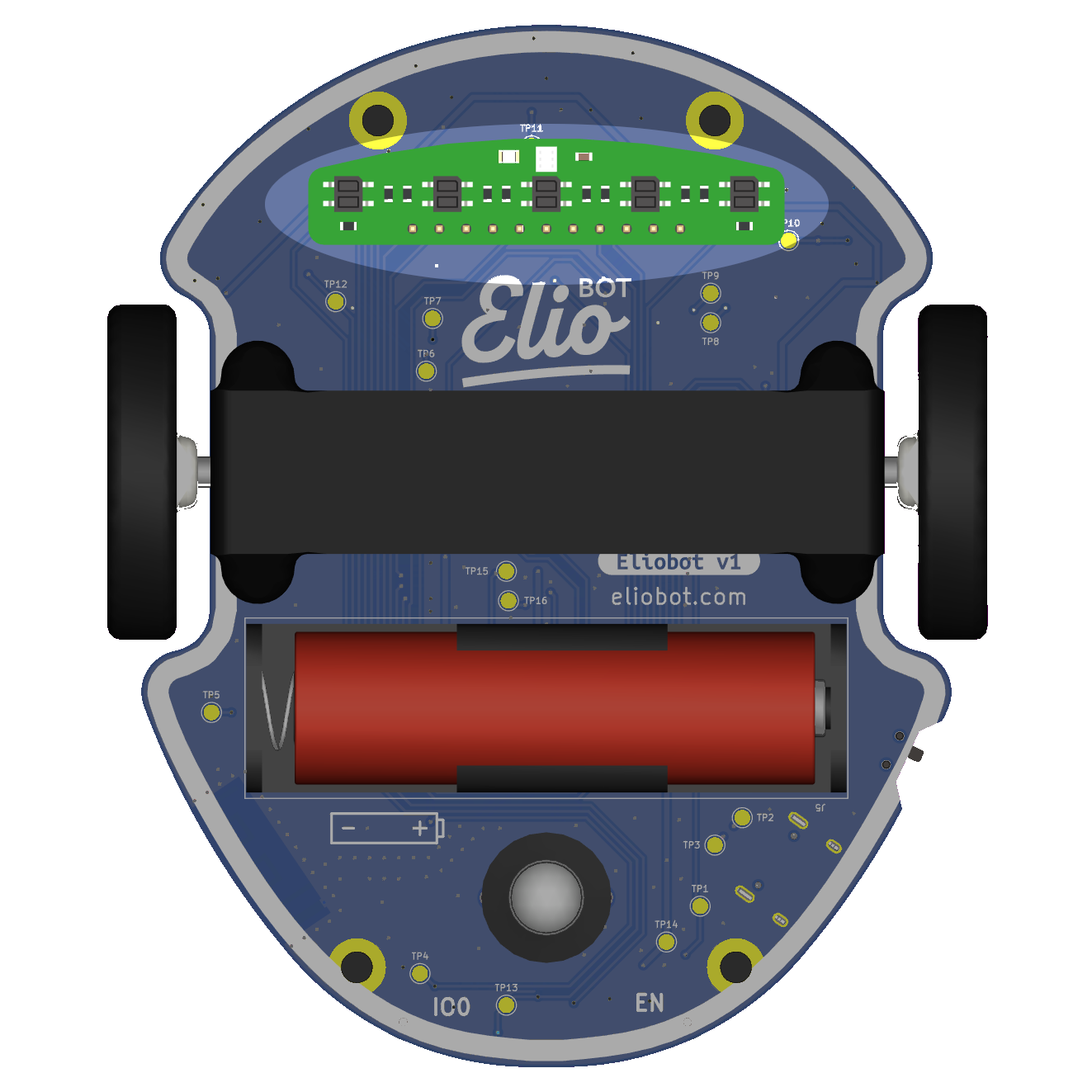
Les capteurs de ligne d'Eliobot sont des capteurs infrarouges qui permettent de détecter les lignes.
Zur Verwendung mit Elioblocs
Um Eliobot-Zeilensensoren auf Elioblocs zu verwenden, verwenden wir Blöcke aus der Kategorie  .
.
Verwendung mit Python
Mit Python müssen Sie jeden Zeilensensor als Objekt definieren. Wir haben 5 Sensoren am Zeilensensor, sie sind an folgende Pins angeschlossen:
| Capteur 1 | Capteur 2 | Capteur 3 | Capteur 4 | Capteur 5 | |
|---|---|---|---|---|---|
| Pin | IO10 | IO11 | IO12 | IO13 | IO14 |
Wir verwenden das reflektierte Licht, um die Linie zu erkennen, wir messen das Umgebungslicht und das reflektierte Licht, um den Wert zu berechnen.
Die Sensoren liefern analoge Werte.
Verwandte Beispiele
Elioblocs-Beispiel
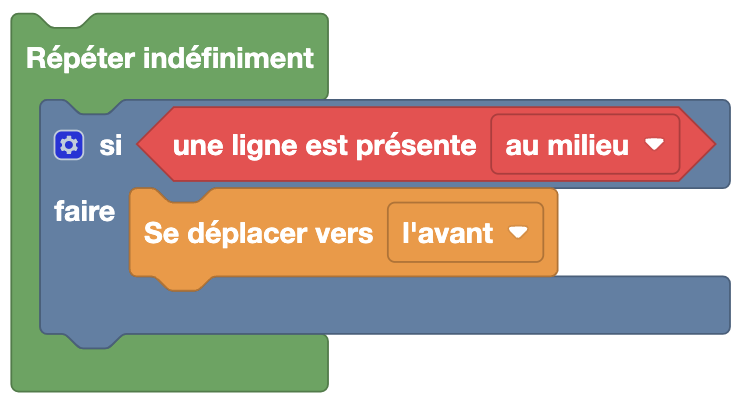
Wenn wir hier eine Linie unter Sensor 3 (dem mittleren Sensor) erkennen, bewegen wir uns vorwärts.
Python-Beispiel
Mit der Bibliothek elio.py
import board
import pwmio
import analogio
import digitalio
from elio import Motors, LineSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
lineCmd = digitalio.DigitalInOut(board.IO33)
lineCmd.direction = digitalio.Direction.OUTPUT
lineInput = [
analogio.AnalogIn(board.IO10), # Capteur 0
analogio.AnalogIn(board.IO11), # Capteur 1
analogio.AnalogIn(board.IO12), # Capteur 2 (centre)
analogio.AnalogIn(board.IO13), # Capteur 3
analogio.AnalogIn(board.IO14), # Capteur 4
]
line_sensor = LineSensor(lineInput, lineCmd, motors)
threshold = 5000 # Seuil de détection (à calibrer)
while True:
if line_sensor.get_line(2) > threshold: # Capteur central détecte une ligne
motors.move_forward(100)
Wenn wir hier eine Linie unter dem zentralen Sensor (Index 2) erkennen, bewegen wir uns vorwärts.
Der Schwellenwert ist ein Näherungswert – verwenden Sie line_sensor.calibrate_line_sensors(), um ihn automatisch zu berechnen.
Ohne die Bibliothek elio.py
import board
import analogio
import digitalio
import time
lineCmd = digitalio.DigitalInOut(board.IO33)
lineCmd.direction = digitalio.Direction.OUTPUT
capteur_centre = analogio.AnalogIn(board.IO12) # Capteur 2 (centre)
def get_line_value():
lineCmd.value = True
time.sleep(0.02)
lit = capteur_centre.value
lineCmd.value = False
time.sleep(0.02)
ambient = capteur_centre.value
return ambient - lit
threshold = 5000
while True:
if get_line_value() > threshold:
print("Ligne détectée !")
Der zurückgegebene Wert ist die Differenz zwischen Umgebungslicht und reflektiertem Licht: Je höher dieser ist, desto kontrastreicher ist die Linie.