Capteurs de ligne
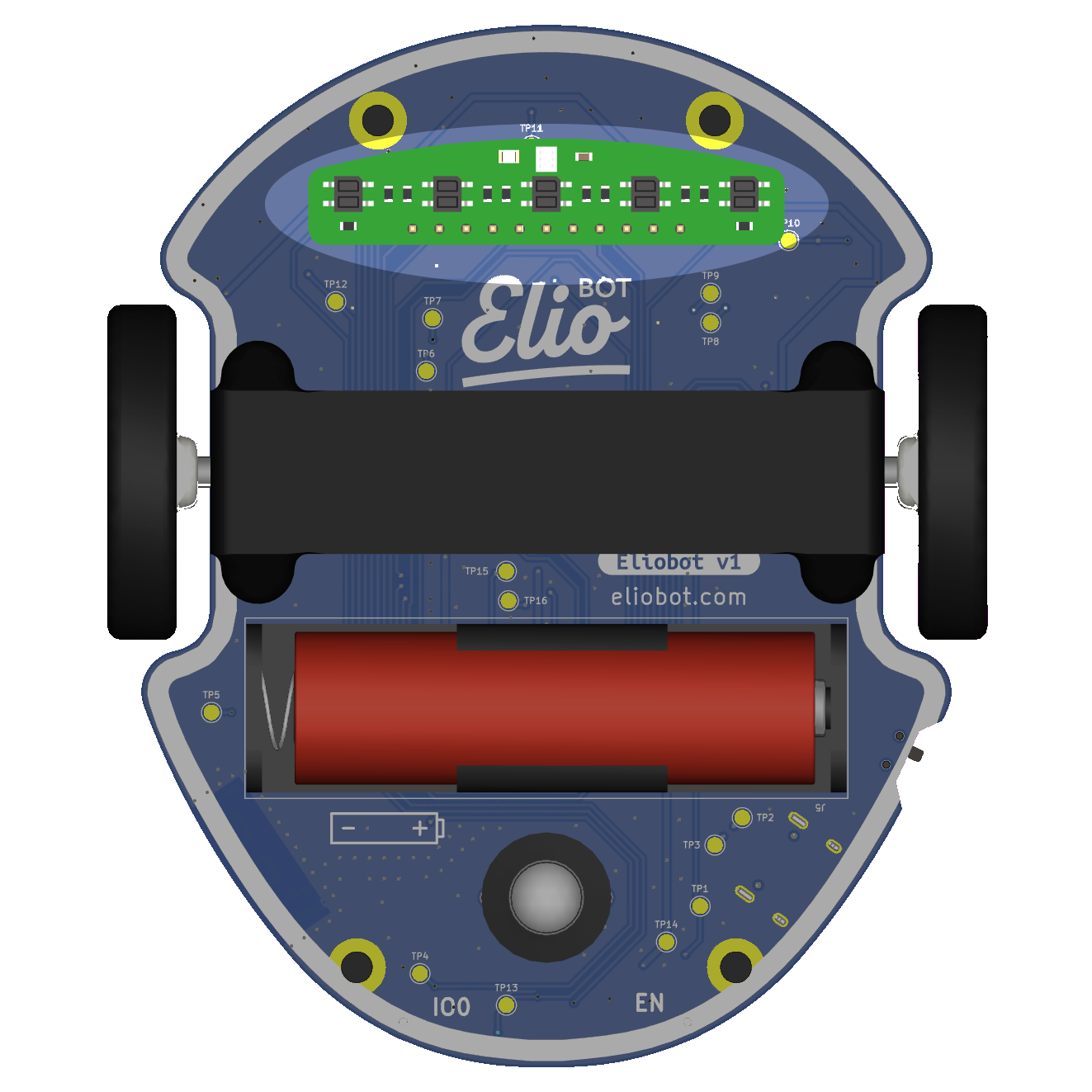
Les capteurs de ligne d'Eliobot sont des capteurs infrarouges qui permettent de détecter les lignes.
Utilisation avec Elioblocs
Pour utiliser les capteurs de ligne d'Eliobot sur Elioblocs, on utilise les blocs de la catégorie  .
.
Utilisation avec Python
Avec python, il faut définir chaque capteur de ligne comme un objet. On a 5 capteurs sur le capteur de ligne, ils sont branché sur les pins suivants :
| Capteur 1 | Capteur 2 | Capteur 3 | Capteur 4 | Capteur 5 | |
|---|---|---|---|---|---|
| Pin | IO10 | IO11 | IO12 | IO13 | IO14 |
On utilise la lumière réfléchie pour détecter la ligne, on mesure la lumière ambiante et la lumière réfléchie pour calculer la valeur.
Les capteurs renvoient des valeurs analogiques.
Exemples associés
Exemple Elioblocs
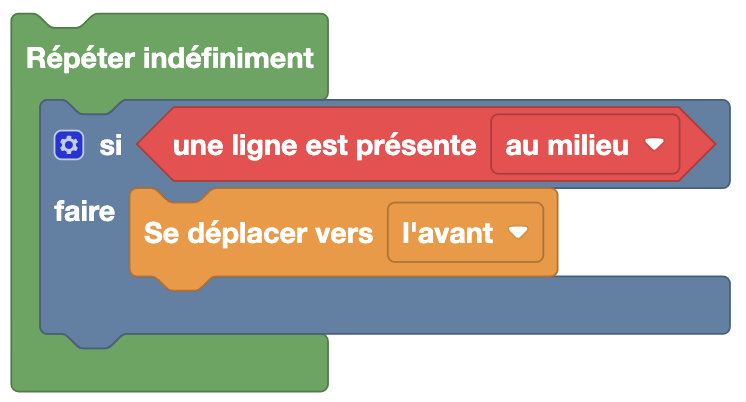
Ici si on détecte une ligne sous le capteur 3 (le capteur du milieu), on avance.
Exemple Python
Avec la librairie elio.py
import board
import pwmio
import analogio
import digitalio
from elio import Motors, LineSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
lineCmd = digitalio.DigitalInOut(board.IO33)
lineCmd.direction = digitalio.Direction.OUTPUT
lineInput = [
analogio.AnalogIn(board.IO10), # Capteur 0
analogio.AnalogIn(board.IO11), # Capteur 1
analogio.AnalogIn(board.IO12), # Capteur 2 (centre)
analogio.AnalogIn(board.IO13), # Capteur 3
analogio.AnalogIn(board.IO14), # Capteur 4
]
line_sensor = LineSensor(lineInput, lineCmd, motors)
threshold = 5000 # Seuil de détection (à calibrer)
while True:
if line_sensor.get_line(2) > threshold: # Capteur central détecte une ligne
motors.move_forward(100)
Ici si on détecte une ligne sous le capteur central (index 2), on avance.
Le seuil est approximatif — utilise line_sensor.calibrate_line_sensors() pour le calculer automatiquement.
Sans la librairie elio.py
import board
import analogio
import digitalio
import time
lineCmd = digitalio.DigitalInOut(board.IO33)
lineCmd.direction = digitalio.Direction.OUTPUT
capteur_centre = analogio.AnalogIn(board.IO12) # Capteur 2 (centre)
def get_line_value():
lineCmd.value = True
time.sleep(0.02)
lit = capteur_centre.value
lineCmd.value = False
time.sleep(0.02)
ambient = capteur_centre.value
return ambient - lit
threshold = 5000
while True:
if get_line_value() > threshold:
print("Ligne détectée !")
La valeur retournée est la différence entre la lumière ambiante et la lumière réfléchie : plus elle est élevée, plus la ligne est contrastée.