Motoren

De motoren van Eliobot worden rechtstreeks door de batterij gevoed en werken dus alleen als de ontstekingsknop in de ON-positie staat.
Gebruik met Elioblocs
Om de motoren van Eliobot op Elioblocs te gebruiken, gebruiken we blokken uit de categorie Mouvement omdat dit de motoren zijn waarmee Eliobot kan bewegen.
Gebruik met Python
Om Eliobot-engines in Python te gebruiken, kunt u de functies gebruiken die beschikbaar zijn in de elio.py bibliotheek.
De motoren zijn aangesloten op de volgende pinnen:
| Moteur gauche | Moteur droit | |
|---|---|---|
| IN1 | IO35 | IO36 |
| IN2 | IO37 | IO38 |
Motoren kunnen op twee manieren worden aangestuurd: digitaal of PWM
Bij digitaal bedrijf hebben we alleen de mogelijkheid om de motor in de ene of de andere richting te draaien en te stoppen.
In PWM is het ook mogelijk om de snelheid van de motor te wijzigen en deze van 0% naar 100% van de maximale snelheid te laten gaan.
Voor meer informatie over pwm: Wikipedia PWM
Gerelateerde voorbeelden
Elioblocs voorbeeld
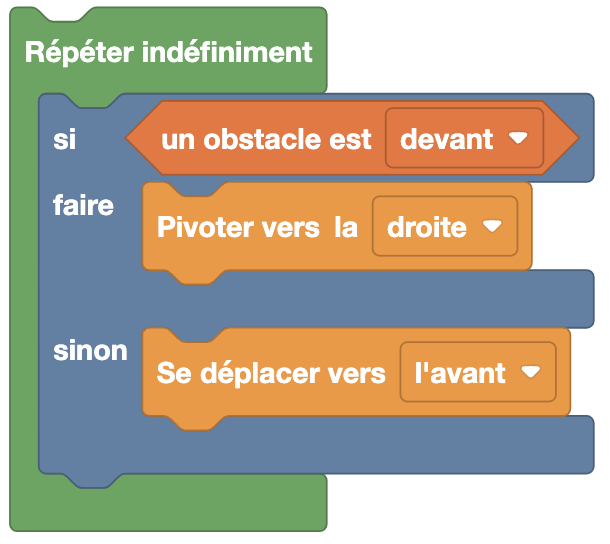
Hier gebruiken we de  -blokken om Eliobot vooruit te laten gaan als hij geen obstakel voor hem detecteert, anders draait hij naar rechts.
-blokken om Eliobot vooruit te laten gaan als hij geen obstakel voor hem detecteert, anders draait hij naar rechts.
Python-voorbeeld
Met de bibliotheek elio.py
import board
import pwmio
import analogio
from elio import Motors, ObstacleSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
obstacle_pins = [
analogio.AnalogIn(board.IO4), # Gauche
analogio.AnalogIn(board.IO5), # Avant
analogio.AnalogIn(board.IO6), # Droite
analogio.AnalogIn(board.IO7), # Arrière
]
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
obstacle_sensor = ObstacleSensor(obstacle_pins)
speed = 100
while True:
if obstacle_sensor.get_obstacle(1): # Obstacle devant
motors.turn_right(speed)
else:
motors.move_forward(speed)
In dit voorbeeld gaat Eliobot vooruit als hij geen obstakel voor hem detecteert, anders draait hij naar rechts.
Zonder de bibliotheek elio.py
import board
import pwmio
import analogio
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
obstacle_avant = analogio.AnalogIn(board.IO5)
vitesse = 65535 # valeur PWM max (0–65535)
while True:
if obstacle_avant.value < 10000: # Obstacle devant
# Tourner à droite
AIN1.duty_cycle = vitesse
AIN2.duty_cycle = 0
BIN1.duty_cycle = 0
BIN2.duty_cycle = vitesse
else:
# Avancer
AIN1.duty_cycle = 0
AIN2.duty_cycle = vitesse
BIN1.duty_cycle = 0
BIN2.duty_cycle = vitesse
Hetzelfde voorbeeld als voorheen, maar zonder gebruik van de elio.py bibliotheek.