Motoare

Motoarele lui Eliobot sunt alimentate direct de la baterie, deci funcționează doar când butonul de aprindere este în poziția ON.
Utilizați cu Elioblocs
Pentru a folosi motoarele Eliobot pe Elioblocs, folosim blocuri din categoria Mouvement deoarece acestea sunt motoarele care permit lui Eliobot să se miște.
Folosind cu Python
Pentru a utiliza motoarele Eliobot în Python, puteți utiliza funcțiile disponibile în biblioteca elio.py.
Motoarele sunt conectate la următorii pini:
| Moteur gauche | Moteur droit | |
|---|---|---|
| IN1 | IO35 | IO36 |
| IN2 | IO37 | IO38 |
Motoarele pot fi controlate în două moduri: digital sau PWM
În funcționarea digitală vom avea doar posibilitatea de a roti motorul într-o direcție sau alta și de a-l opri.
În PWM va fi posibil să modificați viteza motorului și să îl faceți să treacă de la 0% la 100% din viteza maximă.
Pentru a afla mai multe despre pwm: Wikipedia PWM
Exemple înrudite
Exemplu Elioblocs
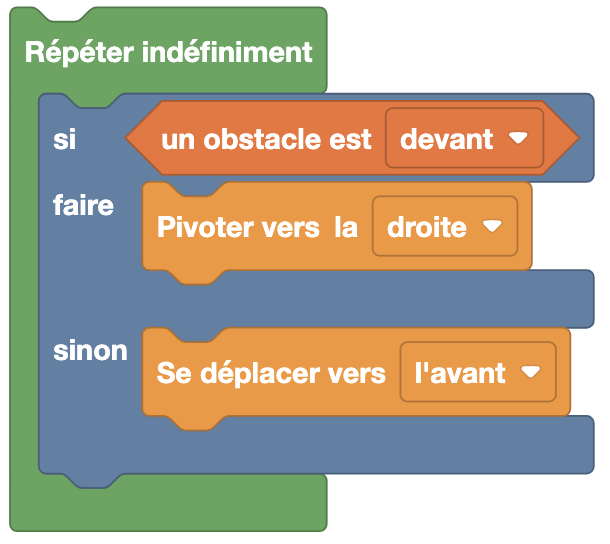
Aici, folosim blocurile  pentru a-l face pe Eliobot să avanseze dacă nu detectează un obstacol în fața lui, în caz contrar el face dreapta.
pentru a-l face pe Eliobot să avanseze dacă nu detectează un obstacol în fața lui, în caz contrar el face dreapta.
Exemplu Python
Cu biblioteca elio.py
import board
import pwmio
import analogio
from elio import Motors, ObstacleSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
obstacle_pins = [
analogio.AnalogIn(board.IO4), # Gauche
analogio.AnalogIn(board.IO5), # Avant
analogio.AnalogIn(board.IO6), # Droite
analogio.AnalogIn(board.IO7), # Arrière
]
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
obstacle_sensor = ObstacleSensor(obstacle_pins)
speed = 100
while True:
if obstacle_sensor.get_obstacle(1): # Obstacle devant
motors.turn_right(speed)
else:
motors.move_forward(speed)
În acest exemplu, Eliobot înaintează dacă nu detectează un obstacol în fața lui, altfel face dreapta.
Fără bibliotecă elio.py
import board
import pwmio
import analogio
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
obstacle_avant = analogio.AnalogIn(board.IO5)
vitesse = 65535 # valeur PWM max (0–65535)
while True:
if obstacle_avant.value < 10000: # Obstacle devant
# Tourner à droite
AIN1.duty_cycle = vitesse
AIN2.duty_cycle = 0
BIN1.duty_cycle = 0
BIN2.duty_cycle = vitesse
else:
# Avancer
AIN1.duty_cycle = 0
AIN2.duty_cycle = vitesse
BIN1.duty_cycle = 0
BIN2.duty_cycle = vitesse
Același exemplu ca înainte, dar fără a utiliza biblioteca elio.py.