Motori

I motori di Eliobot sono alimentati direttamente dalla batteria, quindi funzionano solo quando il pulsante di accensione è in posizione ON.
Utilizzare con Eliobloc
Per utilizzare i motori di Eliobot sugli Eliobloc, utilizziamo i blocchi della categoria Mouvement perché sono i motori che permettono a Eliobot di muoversi.
Utilizzo con Python
Per utilizzare i motori Eliobot in Python è possibile utilizzare le funzioni disponibili nella libreria elio.py.
I motori sono collegati ai seguenti pin:
| Moteur gauche | Moteur droit | |
|---|---|---|
| IN1 | IO35 | IO36 |
| IN2 | IO37 | IO38 |
I motori possono essere controllati in due modi: digitale o PWM
Nel funzionamento digitale avremo solo la possibilità di far girare il motore in un senso o nell'altro, e fermarlo.
In PWM sarà anche possibile modificare la velocità del motore e farla passare dallo 0% al 100% della sua velocità massima.
Per saperne di più su pwm: Wikipedia PWM
Esempi correlati
Esempio di Eliobloc
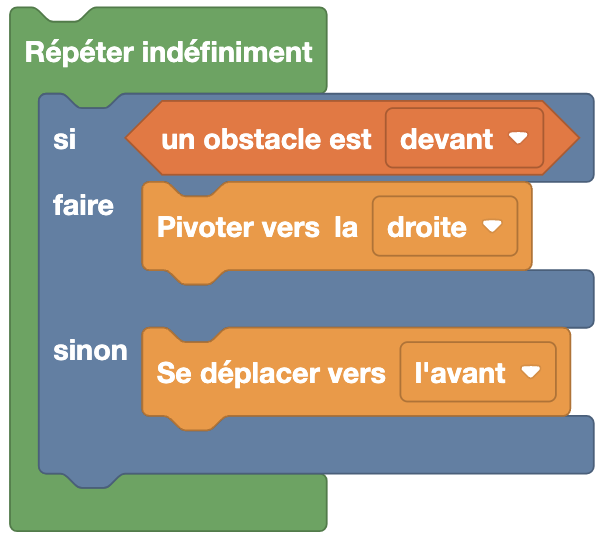
Qui utilizziamo i blocchi  per far avanzare Eliobot se non rileva un ostacolo davanti a sé, altrimenti gira a destra.
per far avanzare Eliobot se non rileva un ostacolo davanti a sé, altrimenti gira a destra.
Esempio di Python
Con la libreria elio.py
import board
import pwmio
import analogio
from elio import Motors, ObstacleSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
obstacle_pins = [
analogio.AnalogIn(board.IO4), # Gauche
analogio.AnalogIn(board.IO5), # Avant
analogio.AnalogIn(board.IO6), # Droite
analogio.AnalogIn(board.IO7), # Arrière
]
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
obstacle_sensor = ObstacleSensor(obstacle_pins)
speed = 100
while True:
if obstacle_sensor.get_obstacle(1): # Obstacle devant
motors.turn_right(speed)
else:
motors.move_forward(speed)
In questo esempio Eliobot avanza se non rileva un ostacolo davanti a sé, altrimenti gira a destra.
Senza la libreria elio.py
import board
import pwmio
import analogio
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
obstacle_avant = analogio.AnalogIn(board.IO5)
vitesse = 65535 # valeur PWM max (0–65535)
while True:
if obstacle_avant.value < 10000: # Obstacle devant
# Tourner à droite
AIN1.duty_cycle = vitesse
AIN2.duty_cycle = 0
BIN1.duty_cycle = 0
BIN2.duty_cycle = vitesse
else:
# Avancer
AIN1.duty_cycle = 0
AIN2.duty_cycle = vitesse
BIN1.duty_cycle = 0
BIN2.duty_cycle = vitesse
Stesso esempio di prima, ma senza utilizzare la libreria elio.py.