motores
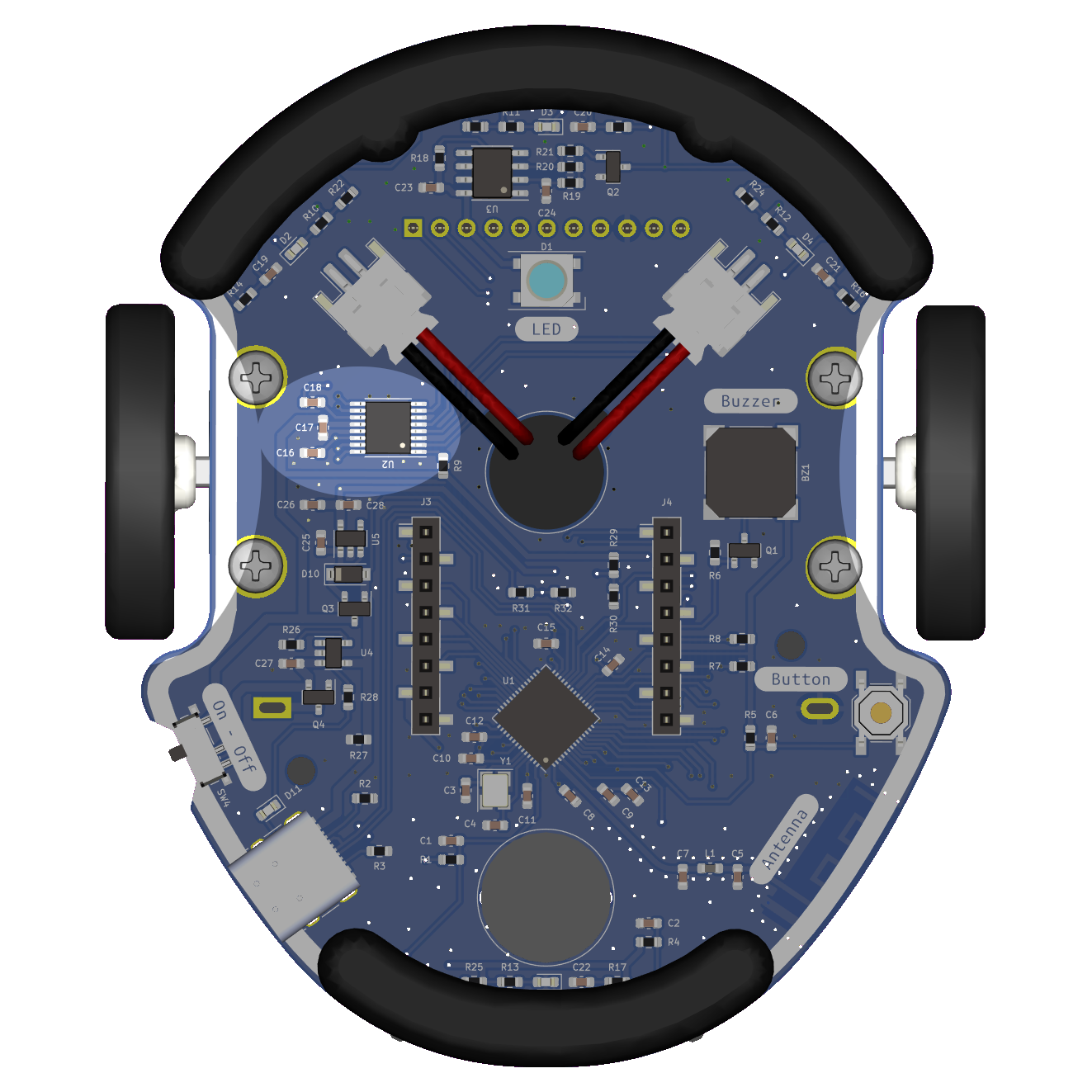

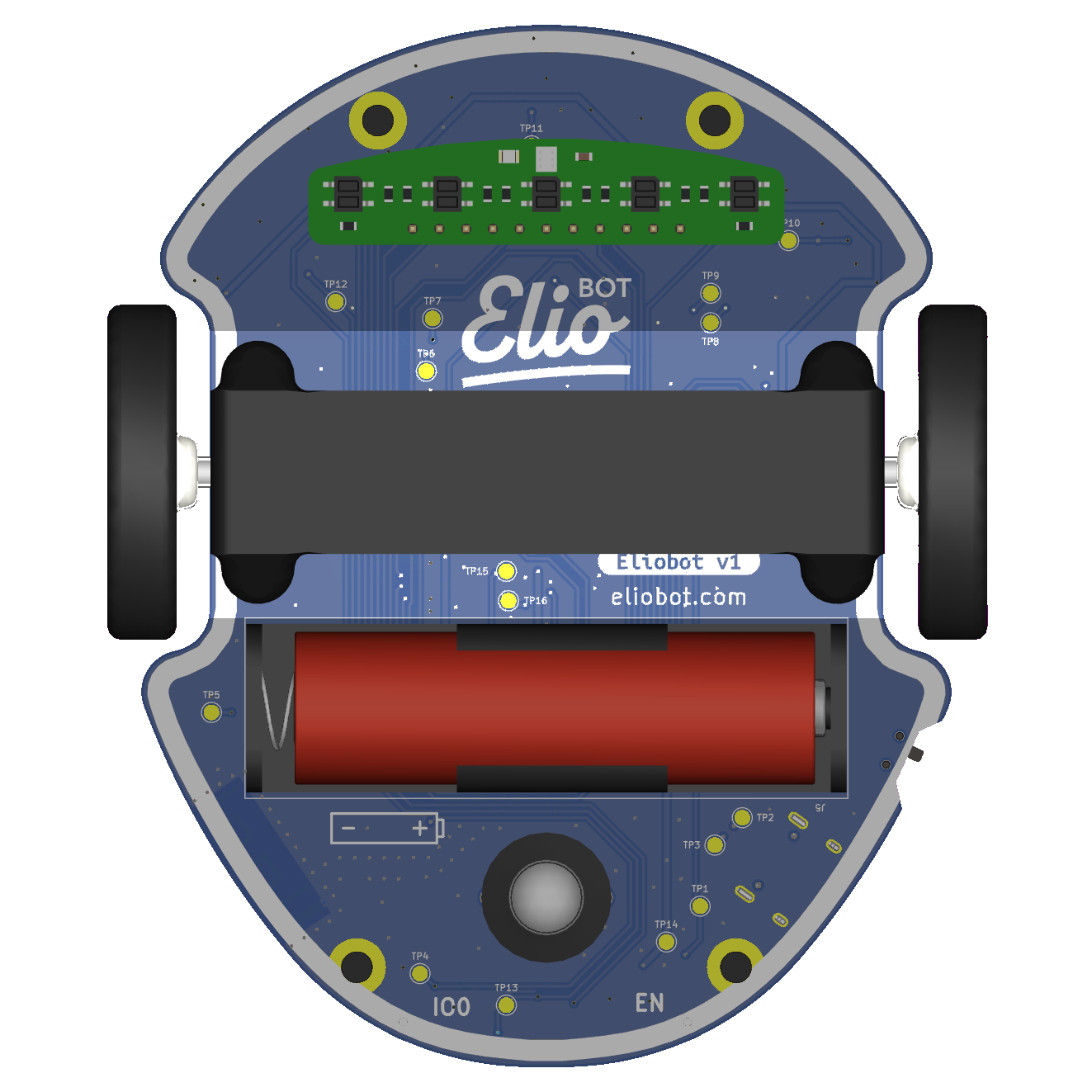
Los motores de Eliobot funcionan directamente con la batería, por lo que solo funcionan cuando el botón de encendido está en la posición ON.
Usar con Elioblocs
Para usar los motores de Eliobot en Elioblocs, usamos bloques de la categoría Mouvement porque estos son los motores que permiten que Eliobot se mueva.
Usando con Python
Para utilizar motores Eliobot en Python, puede utilizar las funciones disponibles en la biblioteca elio.py.
Los motores están conectados a los siguientes pines:
| Moteur gauche | Moteur droit | |
|---|---|---|
| IN1 | IO35 | IO36 |
| IN2 | IO37 | IO38 |
Los motores se pueden controlar de dos formas: digital o PWM.
En funcionamiento digital sólo tendremos la posibilidad de girar el motor en un sentido u otro, y detenerlo.
En PWM también será posible modificar la velocidad del motor y hacer que pase del 0% al 100% de su velocidad máxima.
Para obtener más información sobre pwm: Wikipedia PWM
Ejemplos relacionados
Ejemplo de elioblocs
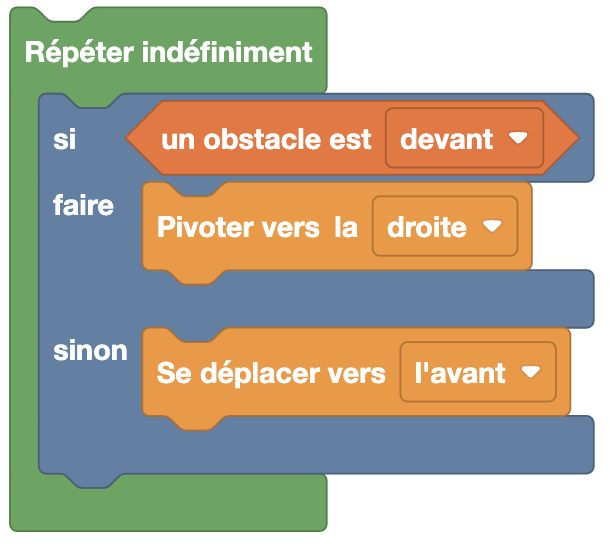
Aquí usamos los bloques  para hacer que Eliobot avance si no detecta un obstáculo frente a él, de lo contrario gira a la derecha.
para hacer que Eliobot avance si no detecta un obstáculo frente a él, de lo contrario gira a la derecha.
Ejemplo de Python
Con la biblioteca elio.py
import board
import pwmio
import analogio
from elio import Motors, ObstacleSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
obstacle_pins = [
analogio.AnalogIn(board.IO4), # Gauche
analogio.AnalogIn(board.IO5), # Avant
analogio.AnalogIn(board.IO6), # Droite
analogio.AnalogIn(board.IO7), # Arrière
]
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
obstacle_sensor = ObstacleSensor(obstacle_pins)
speed = 100
while True:
if obstacle_sensor.get_obstacle(1): # Obstacle devant
motors.turn_right(speed)
else:
motors.move_forward(speed)
En este ejemplo, Eliobot avanza si no detecta ningún obstáculo delante de él, en caso contrario gira a la derecha.
Sin la biblioteca elio.py
import board
import pwmio
import analogio
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
obstacle_avant = analogio.AnalogIn(board.IO5)
vitesse = 65535 # valeur PWM max (0–65535)
while True:
if obstacle_avant.value < 10000: # Obstacle devant
# Tourner à droite
AIN1.duty_cycle = vitesse
AIN2.duty_cycle = 0
BIN1.duty_cycle = 0
BIN2.duty_cycle = vitesse
else:
# Avancer
AIN1.duty_cycle = 0
AIN2.duty_cycle = vitesse
BIN1.duty_cycle = 0
BIN2.duty_cycle = vitesse
El mismo ejemplo que antes, pero sin utilizar la biblioteca elio.py.