Moteurs

Les moteurs de Eliobot sont alimentés directement par la batterie, ils fonctionnent donc seulement lorsque le bouton d'allumage est en position ON.
Utilisation avec Elioblocs
Pour utiliser les moteurs de Eliobot sur Elioblocs, on utilise les blocs de la catégorie Mouvement car ce sont les moteurs qui permettent à Eliobot de se déplacer.
Utilisation avec Python
Pour utiliser les moteurs de Eliobot en Python, tu peux utiliser les fonctions disponibles dans la librairie elio.py.
Les moteurs sont branchés sur les pins suivants :
| Moteur gauche | Moteur droit | |
|---|---|---|
| IN1 | IO35 | IO36 |
| IN2 | IO37 | IO38 |
Les moteurs peuvent être contrôlé de deux façons : Digital ou PWM
En fonctionnement digital on aura uniquement la possibiliter de faire tourner les moteur dans un sens ou l'autre, et l'arrêter.
En PWM il sera en plus possible de modifier la vitesse du moteur et de le faire aller de 0% à 100% de sa vitesse maximale.
Pour en savoir plus sur la pwm : Wikipedia PWM
Exemples associés
Exemple Elioblocs
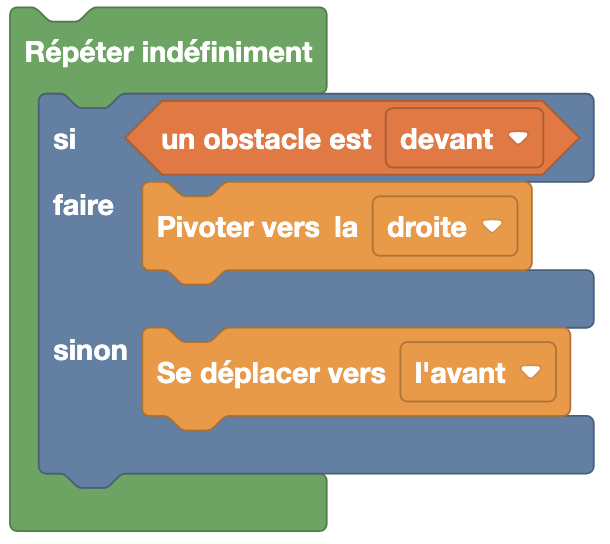
Ici, on utilise les blocs  pour faire avancer Eliobot s'il ne détecte pas d'obstacle devant lui sinon il tourne à droite.
pour faire avancer Eliobot s'il ne détecte pas d'obstacle devant lui sinon il tourne à droite.
Exemple Python
Avec la librairie elio.py
import board
import pwmio
import analogio
from elio import Motors, ObstacleSensor
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
vBatt_pin = analogio.AnalogIn(board.BATTERY)
obstacle_pins = [
analogio.AnalogIn(board.IO4), # Gauche
analogio.AnalogIn(board.IO5), # Avant
analogio.AnalogIn(board.IO6), # Droite
analogio.AnalogIn(board.IO7), # Arrière
]
motors = Motors(AIN1, AIN2, BIN1, BIN2, vBatt_pin)
obstacle_sensor = ObstacleSensor(obstacle_pins)
speed = 100
while True:
if obstacle_sensor.get_obstacle(1): # Obstacle devant
motors.turn_right(speed)
else:
motors.move_forward(speed)
Dans cet exemple, Eliobot avance s'il ne détecte pas d'obstacle devant lui, sinon il tourne à droite.
Sans la librairie elio.py
import board
import pwmio
import analogio
AIN1 = pwmio.PWMOut(board.IO36)
AIN2 = pwmio.PWMOut(board.IO38)
BIN1 = pwmio.PWMOut(board.IO35)
BIN2 = pwmio.PWMOut(board.IO37)
obstacle_avant = analogio.AnalogIn(board.IO5)
vitesse = 65535 # valeur PWM max (0–65535)
while True:
if obstacle_avant.value < 10000: # Obstacle devant
# Tourner à droite
AIN1.duty_cycle = vitesse
AIN2.duty_cycle = 0
BIN1.duty_cycle = 0
BIN2.duty_cycle = vitesse
else:
# Avancer
AIN1.duty_cycle = 0
AIN2.duty_cycle = vitesse
BIN1.duty_cycle = 0
BIN2.duty_cycle = vitesse
Même exemple que précédemment, mais sans utiliser la librairie elio.py.