Modulo servomotore
Zaino documentazione servomotore
1. Introduzione
Lo zaino Servo Motor è un modulo di espansione che consente di controllare fino a tre servomotori su tre pin di uscita separati. I servomotori sono attuatori rotanti che possono essere utilizzati per controllare la posizione angolare di un asse. Sono comunemente usati nei progetti di robotica, modellismo e automazione.
2. Caratteristiche tecniche
- Numero di servomotori: 3
- Tensione operativa: da 3,3 V a 5 V
- Interfaccia: PWM (modulazione di larghezza di impulso)
- Intervallo di rotazione: da 0 a 180 gradi
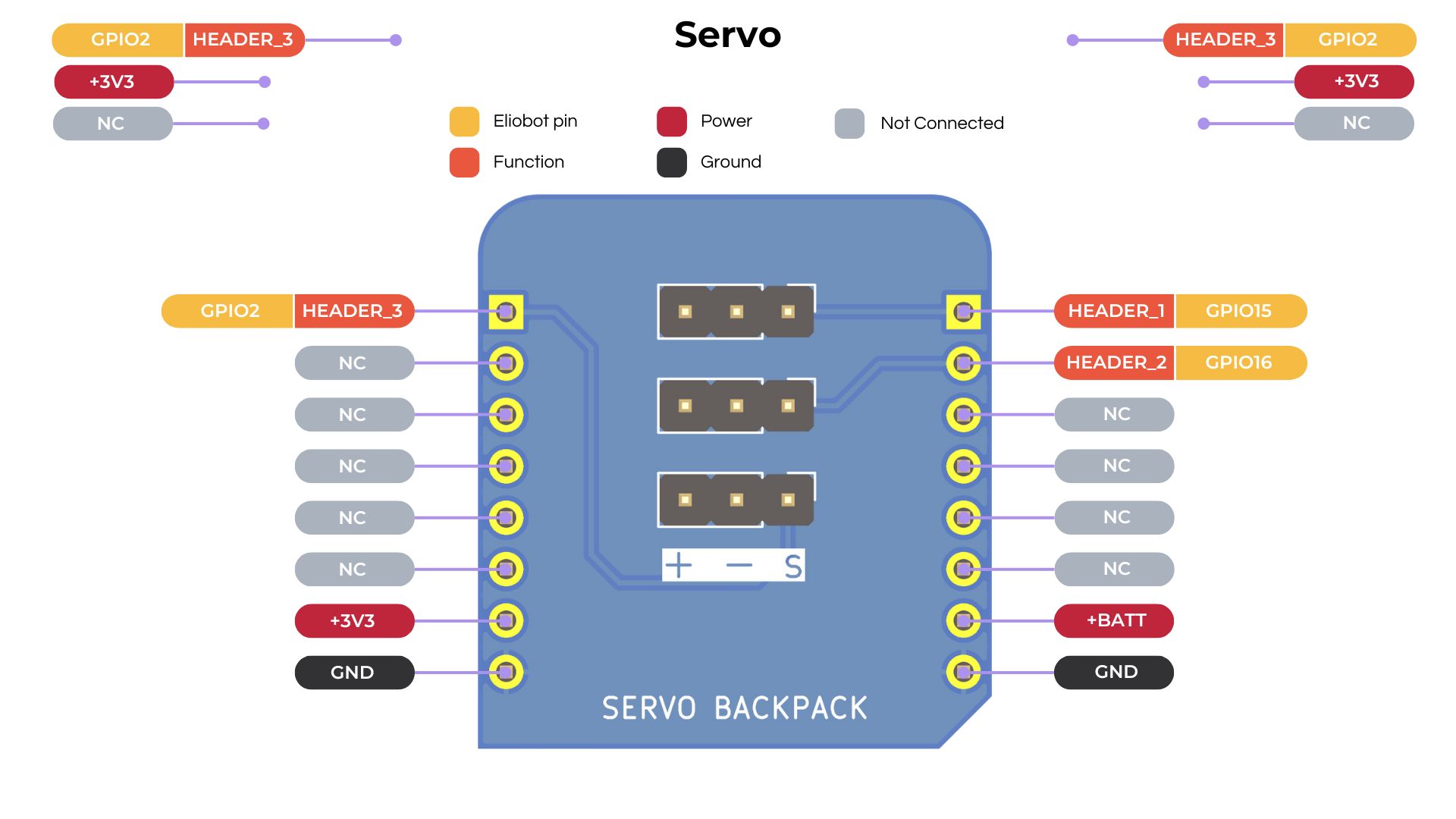
3. Configurazione pin
4. Utilizzo del servomotore con CircuitPython
Installazione della libreria:
- Per utilizzare lo zaino Servomotore in Eliobloc non è necessaria l'installazione di librerie.
Esempio di codice:
import board
import pwmio
import time
pwm = pwmio.PWMOut(board.IO15, frequency=50)
while True:
pwm.duty_cycle = int(((90 / 180.0) * (2750 - 750) + 750) * pwm.frequency * 65535 / 1000000)
time.sleep(1)
pwm.duty_cycle = int(((0 / 180.0) * (2750 - 750) + 750) * pwm.frequency * 65535 / 1000000)
time.sleep(1)