Modul servomotor
Documentație pentru servomotor rucsac
1. Introducere
Rucsacul Servo Motor este un modul de expansiune care vă permite să controlați până la trei servomotoare pe trei pini de ieșire separați. Servomotoarele sunt actuatoare rotative care pot fi utilizate pentru a controla poziția unghiulară a unei axe. Sunt utilizate în mod obișnuit în proiecte de robotică, modelare și automatizare.
2. Caracteristici tehnice
- Număr de servomotoare: 3
- Tensiune de funcționare: 3,3V până la 5V
- Interfață: PWM (Pulse Width Modulation)
- Interval de rotație: 0 până la 180 de grade
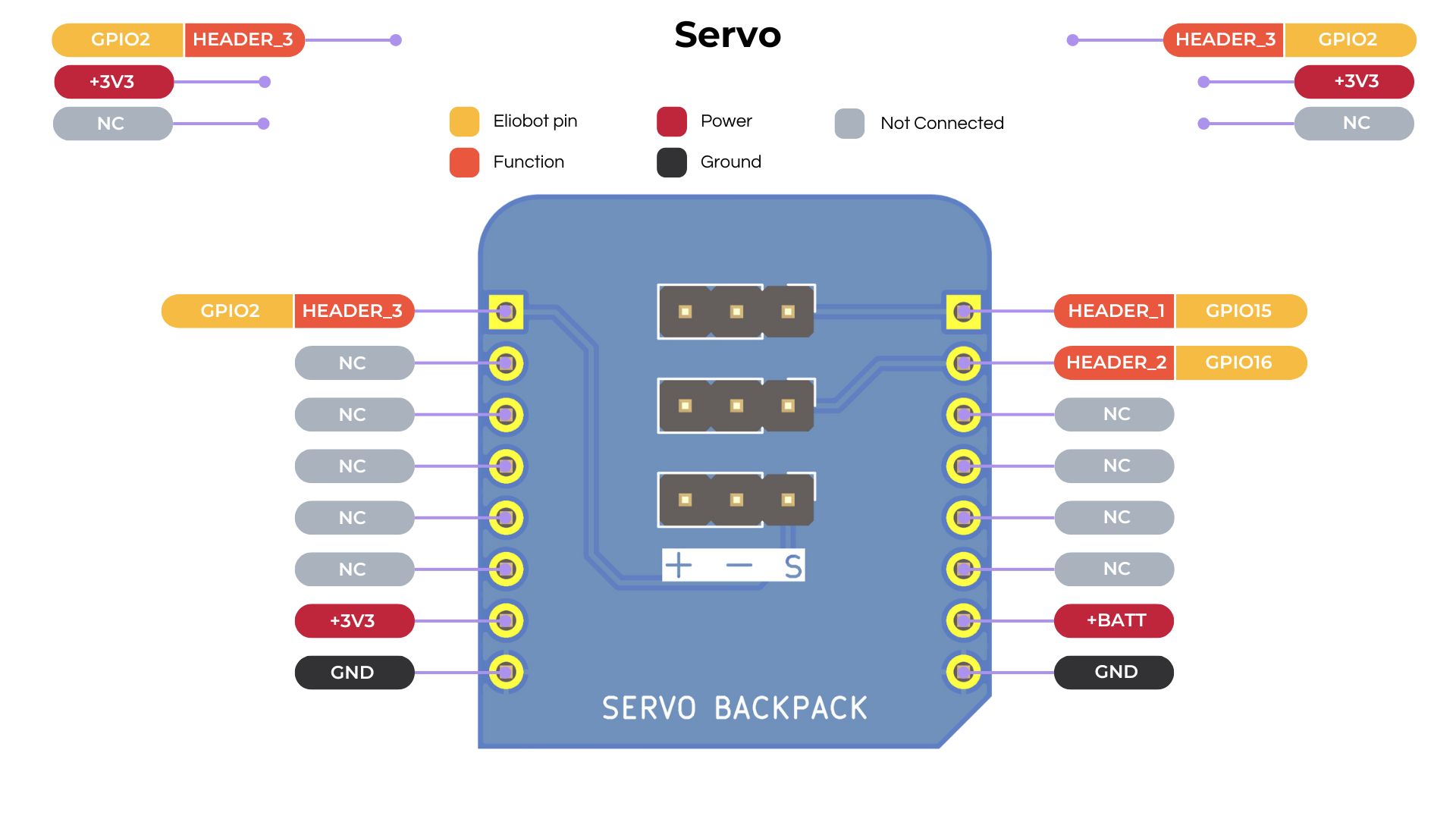
3. Configurare PIN
4. Folosind Servomotor cu CircuitPython
Instalarea bibliotecii:
- Nu este necesară instalarea bibliotecii pentru a utiliza rucsacul Servomotor în Elioblocs.
Exemplu de cod:
import board
import pwmio
import time
pwm = pwmio.PWMOut(board.IO15, frequency=50)
while True:
pwm.duty_cycle = int(((90 / 180.0) * (2750 - 750) + 750) * pwm.frequency * 65535 / 1000000)
time.sleep(1)
pwm.duty_cycle = int(((0 / 180.0) * (2750 - 750) + 750) * pwm.frequency * 65535 / 1000000)
time.sleep(1)