Ultrasone sensor
Ultrasone sensordocumentatie
1. Introductie
Een ultrasone sensor is een apparaat dat geluidsgolven gebruikt om de afstand van een object te meten. Het zendt een geluidsgolf uit op een specifieke frequentie (meestal 40 kHz) en luistert vervolgens naar de terugkeer van die golf. Door te berekenen hoe lang het duurt voordat de echo terugkeert, kan de sensor de afstand tot het object bepalen. Ultrasone sensoren worden veel gebruikt in de robotica, automatisering en voor obstakeldetectie.
2. Technische kenmerken
- Bedrijfsspanning: 5V DC
- Bedrijfsstroom: 15mA
- Frequentie: 40 kHz
- Maximaal bereik: doorgaans 4 meter
- Minimaal bereik: normaal gesproken 2 cm
- Afmetingen: varieert afhankelijk van het model (bijvoorbeeld HC-SR04: 45 mm x 20 mm x 15 mm)
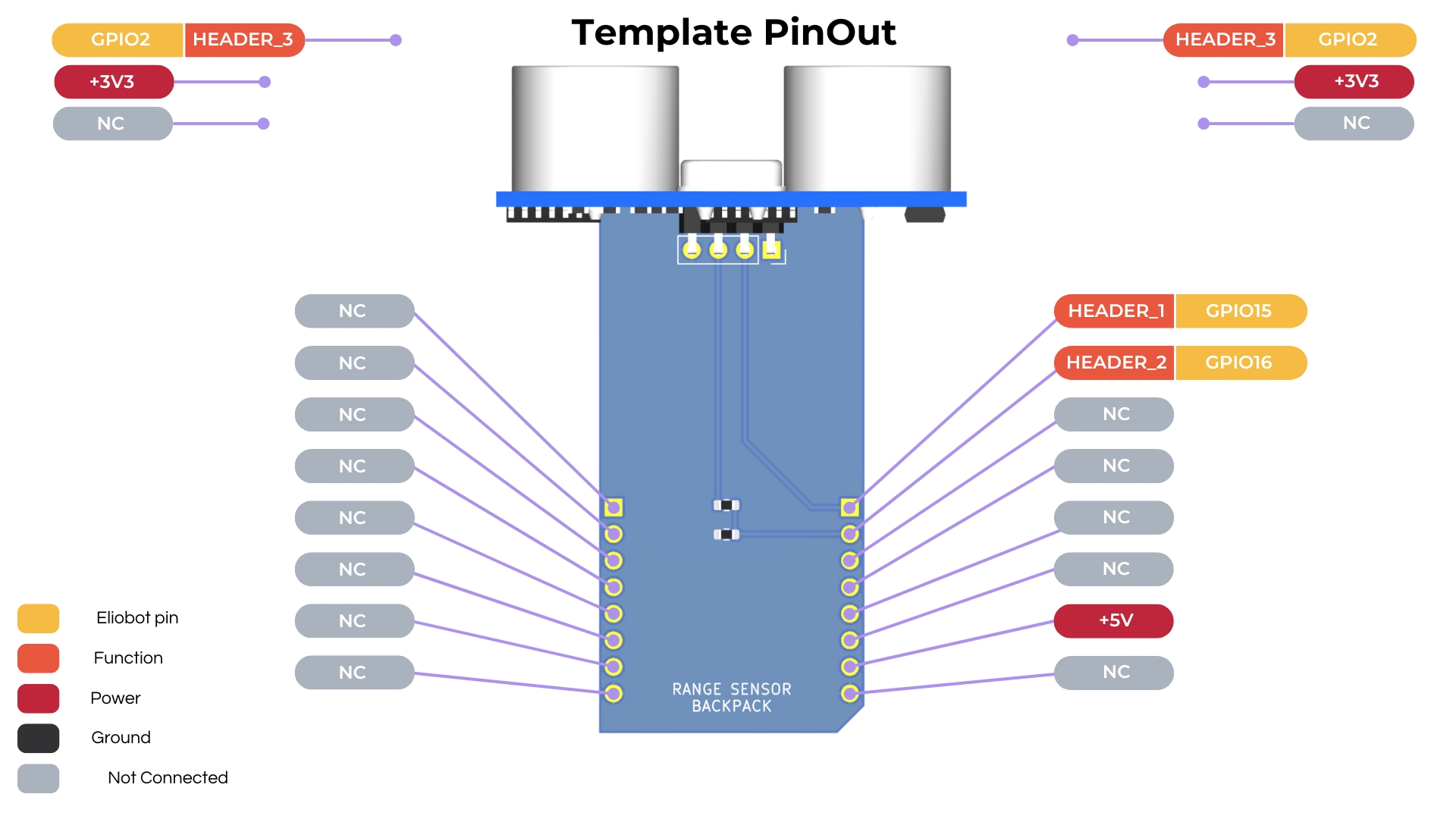
3. Pinconfiguratie
3. De ultrasone sensor gebruiken met CircuitPython
Codevoorbeeld:
import time
import board
from digitalio import DigitalInOut, Direction
import pulseio
trigger = DigitalInOut(board.IO15)
trigger.direction = Direction.OUTPUT
trigger.value = False
echo = pulseio.PulseIn(board.IO16)
echo.pause()
echo.clear()
def measure_distance():
trigger.value = True
time.sleep(0.00001)
trigger.value = False
echo.clear()
echo.resume()
start = time.monotonic()
while len(echo) == 0:
if time.monotonic() - start > 0.2:
echo.pause()
return None
echo.pause()
duration = echo[0] / 1000000 # Convertir à des secondes
distance = (duration * 34300) / 2
return distance
while True:
time.sleep(1)
print(measure_distance())
Opmerkingen:
- De
measure_distance()-functie verzendt een puls en meet de tijd die nodig is voordat de echo terugkeert. - De geluidssnelheid wordt gebruikt om de afstand in centimeters te berekenen.
4. Gemeenschappelijke toepassingen
- Obstakelvermijding voor robots
- Afstandsmeting voor automatiseringssystemen
- Parkeerhulpsystemen
- Vloeistofniveaumeting
- Nabijheidssensoren in beveiligingssystemen