Eviter les obstacles
En este tutorial aprenderemos a utilizar sensores para utilizar Eliobot de forma independiente y evitar un obstáculo 😉
Cómo funcionan los sensores infrarrojos
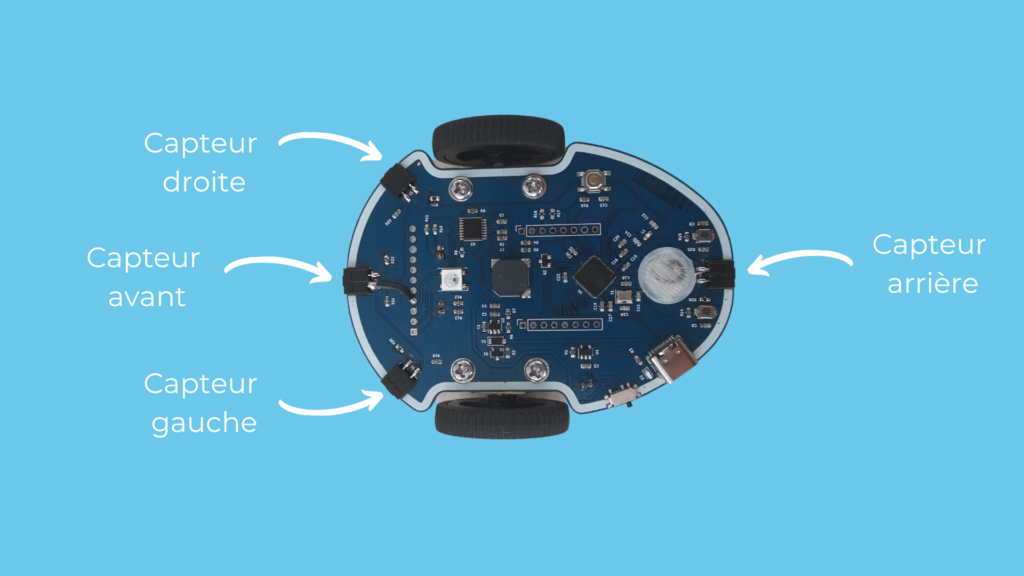
Eliobot está equipado con 4 sensores infrarrojos (ver el diagrama a continuación) que le permiten detectar obstáculos.
Pero técnicamente ¿cómo funciona? 🤔
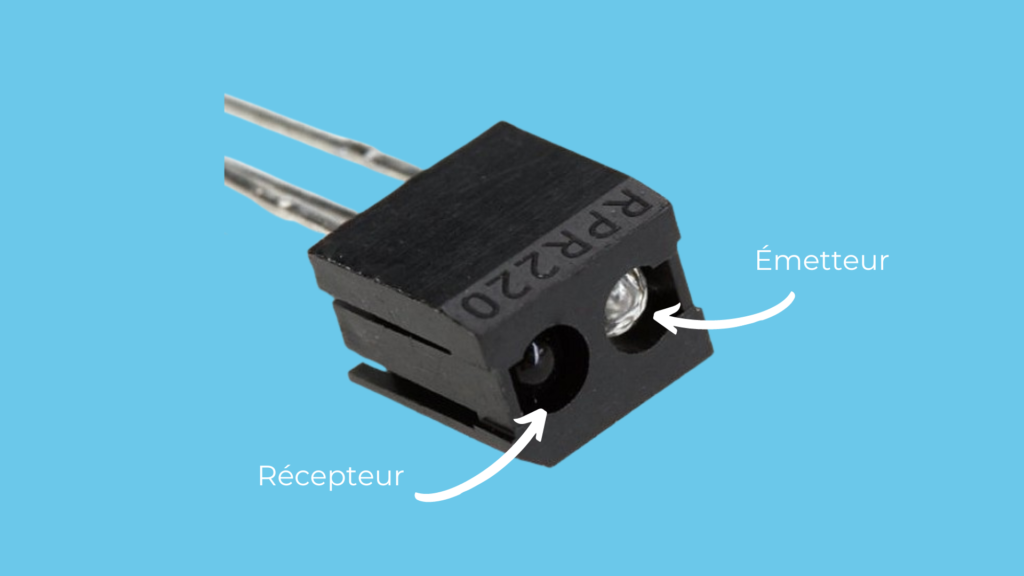
Cada sensor se compone de un transmisor y un receptor. La función del transmisor es enviar luz para iluminar obstáculos. La luz se reflejará entonces hacia el receptor, lo que nos permitirá saber la cantidad de luz recibida y por tanto deducir una distancia.
Cuanto mayor sea la cantidad de luz, más cerca estará el obstáculo.
Detectar un obstáculo
Para iniciar este tutorial, vaya a nuestra interfaz de programación https://app.eliobot.com/.
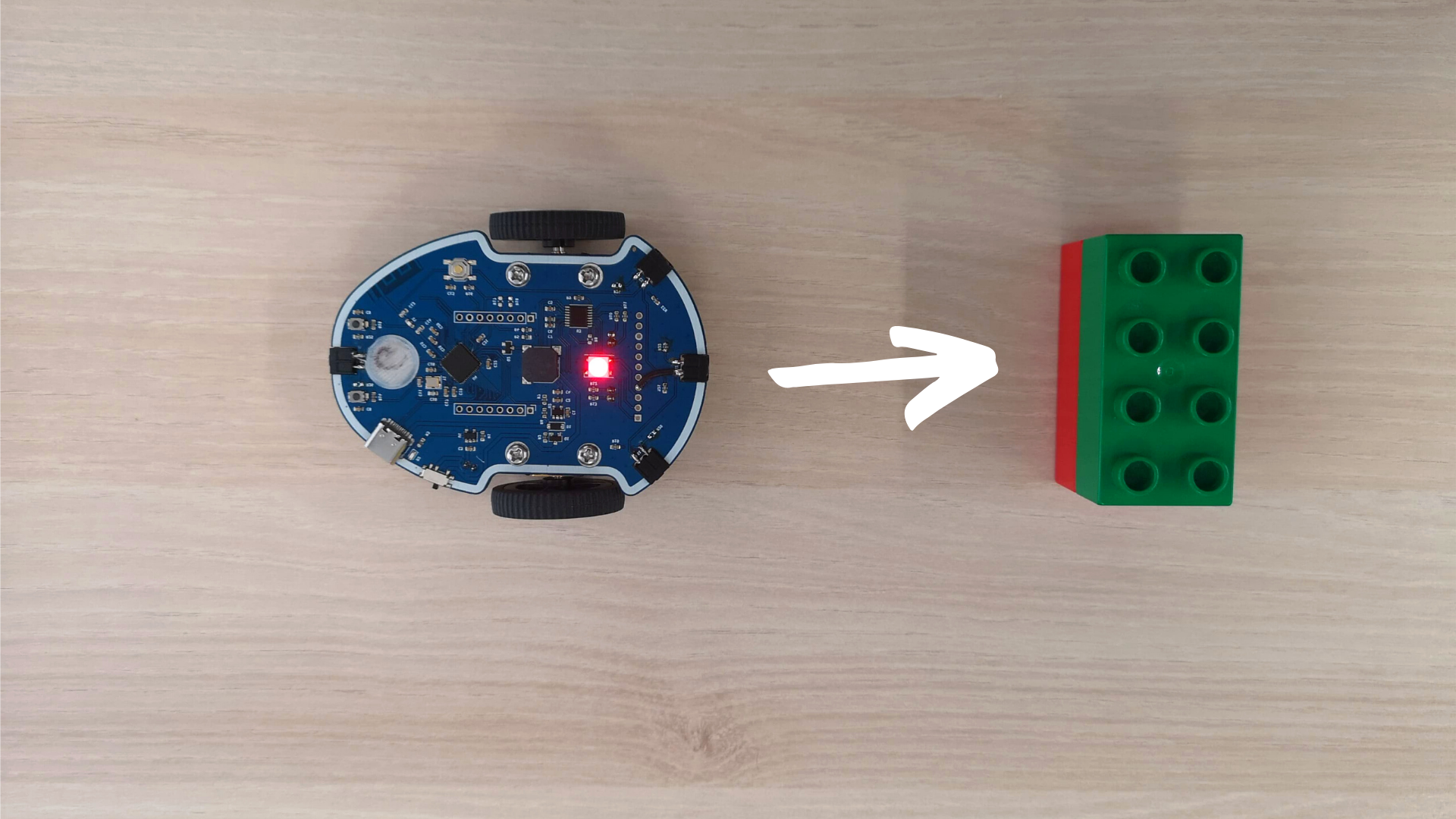
Empezamos con un primer ejemplo sencillo: si Eliobot detecta un obstáculo delante, el LED rojo se enciende. Si Eliobot no detecta ningún obstáculo, el LED se apaga 💡
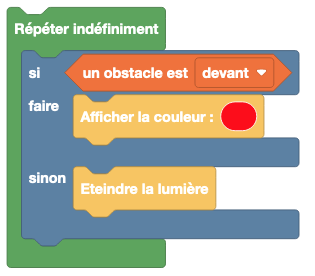
El primer paso es seleccionar la acción de detección de obstáculos. Para hacerlo, ve a la pestaña Obstáculos y selecciona el bloque hay un obstáculo delante.
Es posible elegir qué sensor utilizar, en nuestro caso será el sensor frontal.
Probablemente hayas notado que este nuevo bloque tiene una forma diferente y no se puede usar tal cual con los bloques utilizados hasta ahora. Es un bloque booleano que podremos usar como condición en el bloque Si... hacer... de lo contrario.
Finalmente, para identificar claramente cuando se detecta un obstáculo, muestra un color con el bloque Mostrar color en la rama hacer, y Apagar la luz en la rama de lo contrario.
Selecciona el color de tu preferencia, ¡tú eres el artista! 😉
Esquivar el obstáculo
Ahora que Eliobot es capaz de detectar un obstáculo, podremos decirle qué hacer cuando encuentre uno. La acción más sencilla es simplemente cambiar de dirección girando hacia la derecha o hacia la izquierda.
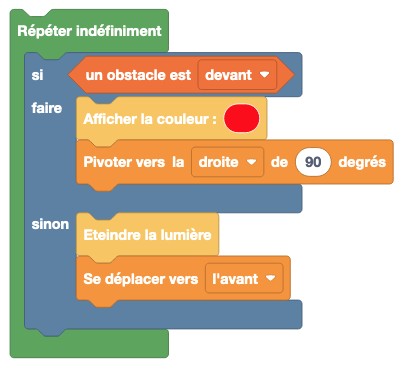
Como la mayor parte del trabajo ya se ha realizado con el programa anterior, lo retomaremos agregando movimientos además de los comandos para el LED.
Primero definimos el movimiento a realizar cuando Eliobot encuentre un obstáculo, en nuestro caso hacer un cuarto de giro hacia la derecha. Para ello, toma el bloque Girar a la derecha 90 grados en la pestaña Movimientos y colócalo debajo del color rojo.
Luego definimos el movimiento a realizar cuando no hay ningún obstáculo, es decir, avanzar. Encontrarás el bloque Avanzar en la pestaña Movimientos; colócalo en la rama de lo contrario.
Transferencia de programa
Para probar el programa en Eliobot, conéctelo a la computadora con el cable USB y haga clic en el botón "Programa".
Luego verás que el LED parpadea y, una vez terminado, podrás desconectar Eliobot para ver el resultado. 🙂